Vectors and Polar Coordinates
A casual walkthrough of university-level vector concepts — cross products, the BAC-CAB rule, and coordinate transformation matrices — with encouragement to derive it yourself!
Chapter 1. Vector
Vectors — well, we’ve been doing them non-stop since high school math class, so there shouldn’t be anything difficult!!!
The first thing that was different from high school vectors when I got to university was probably the cross product??????
After learning the cross product, the thing they taught us going “bam~~~~~ you guys have to memorize this^^” was the Bac(k)-cap rule.
First of all, if you do the vector triple product, the result is? A vector!!!!
Why????????? If you’ve learned the cross product, you’ll know….
And this thing above is something people memorize like a formula called the back-cap rule, but why is this kind of equation written down!?!!??!?????
I think it’s a good practice to derive it yourself to find out why it turns out that way.
It’s simple, so please try deriving it on your own!
Then, next! Coordinate transformation matrix
The coordinate transformation matrix, which was pretty much a basic concept in linear algebra…!
The coordinate transformation matrix is one of the linear mappings (functions), and by mapping the basis vectors of the original coordinate system through that linear mapping, analysis of the linear mapping becomes easy!!
For this kind of concept please refer to ‘Linear algebra that I studied’, and for people who came here for general mechanics, I’ll do it like a textbook does…
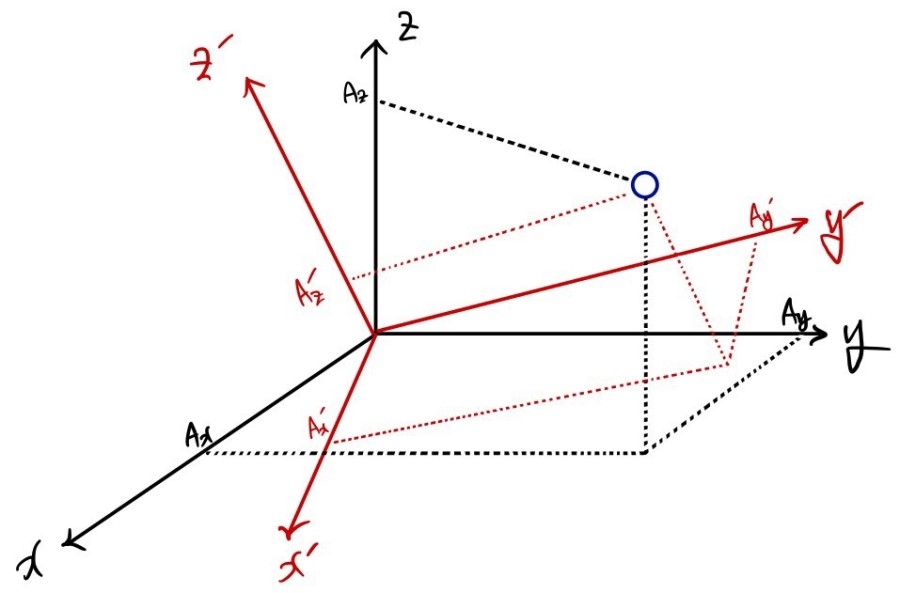
First, let’s express the ‘same vector’ using each of the ‘basis vectors of different coordinate systems’.
And then let’s look for the relationship between the two coordinate systems.
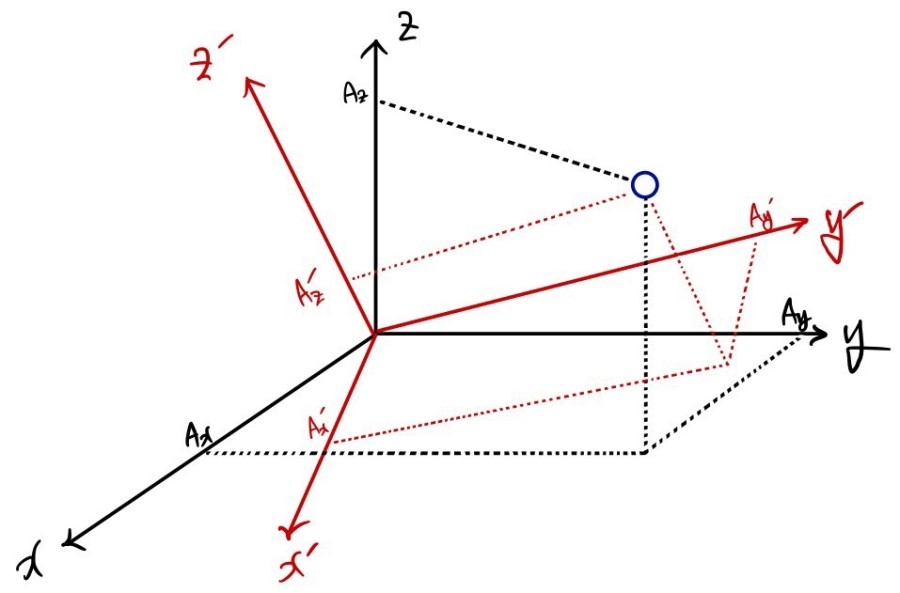
If we express vector A in the basis of the Oxyz (black) coordinate system, it will be
right????
Now then, we need to head toward Ox’y’z’!!!!!
let’s find this. If we take the dot product (projection) of vector A with the unit vector i’ of the x’ axis,
won’t this come out?????
By the same principle,
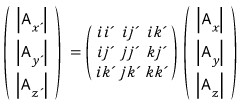
Just expressing the 3 equations listed above in matrix form,
I think even a high school junior could do it! Because they learn matrices in 11th grade??????????
So let’s just rewrite the 3 equations above in matrix form.
Well,….. too easy right?????????? If I add just a little bit more,
Then through the principle above,
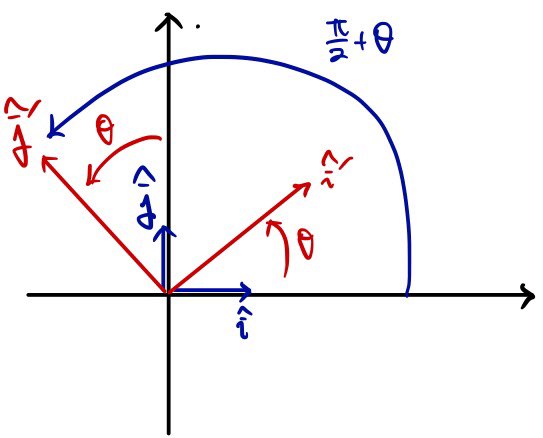
the coordinate rotation matrix that rotates the coordinate system by theta~
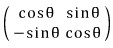
the reason this comes out is precisely

because of this — you can see through it too.
It’s so easy that I wonder why I’m even bothering to write it hehehe
From here on it gets a little more interesting lolololol because they don’t teach it in high school! hehehehe
Polar coordinate system (polar coordinate)
The Cartesian coordinate system (rectangular coordinate system) is just — perfectly~~~ somehow nice lolololol
but sometimes, using it makes things incre~~dibly complicated.
At those times, escaping that coordinate system can make things easier, quite often. !!
(Since I’m a physics major, taking an example from physics — in quantum mechanics for hydrogen, you can solve it with the Schrödinger equation, but at that time if you write the equation in Cartesian????
You’re fed. Not just fed — just think of it as unsolvable. But if you look at it and solve it with polar coordinates at this time??
It becomes solvable!!!!!!! (But it’s not easy lololololol sorry about that)
So now we have to throw away the x axis and y axis that we’ve believed in almost like a religion. …T_T
Before we properly dive in, I’ll remind you that originally “coordinates” meant expressing “the coefficients multiplied onto the basis vectors” as an “ordered pair.”
Rather than saying (2,3) is 2 in x and 3 in y,

it would be more correct to say we write the ordered pair (2,3) because of this.
Now using a polar coordinate system means changing the basis vectors,
and since those coefficients are also different from the original, the numbers to write inside ( , ) will change too.
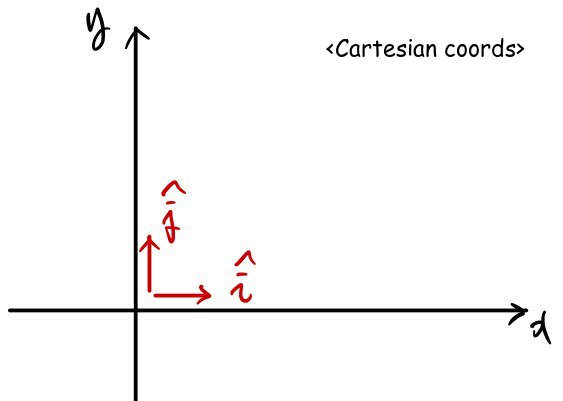
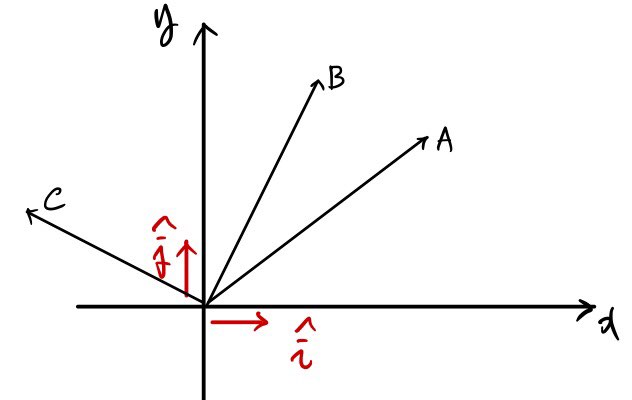
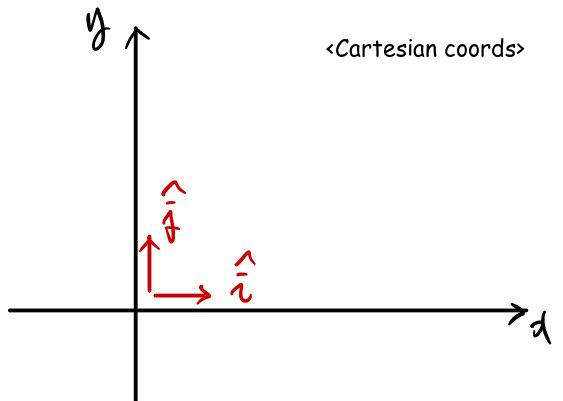
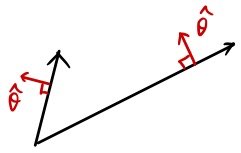
So to roughly see how the basis vectors of the rectangular coordinate system and the basis vectors of polar coordinates are different, first
The polar coordinate system (polar coordinate) does not have a fixed basis.
This means the basis keeps changing…
Right now this might not sink in for us, who are so overly familiar with the x, y, z coordinate system.
Let’s make it understandable in one shot with a picture.
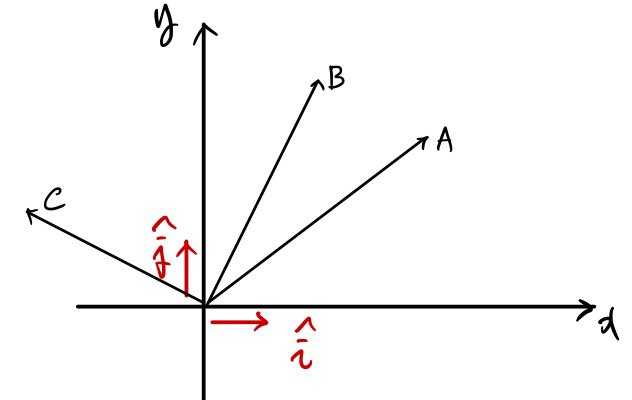
The basis vectors i, j that describe vectors A, B, C are still the same…!
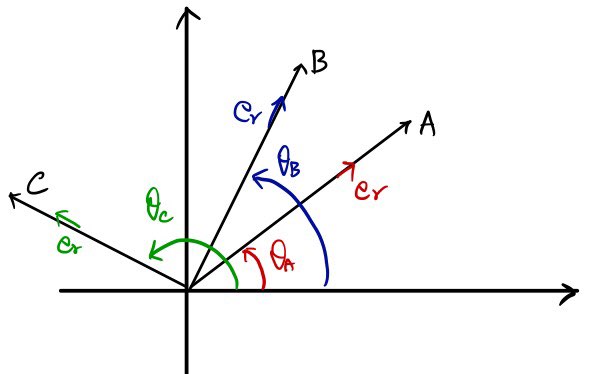
Now look at polar coordinates.
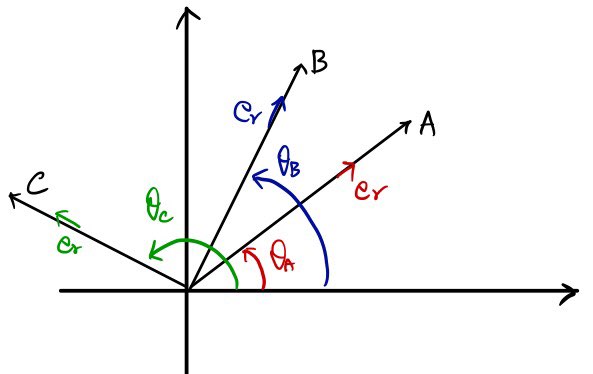

the direction of the vectors representing this, and

the direction of the vectors representing this — they’re different for each vector.
It means when expressing this vector or that vector, the basis is different.
OK.
It might seem like I’m making things more confusing, but why did I bother to say this?????
When looking at velocity and acceleration in the polar coordinate system, I thought it might be confusing without the above mention.
If you’re not confused, you can ignore it!!!!!
Anyway, now, in order to describe velocity, acceleration, etc. in the polar coordinate system,
we’re going to differentiate the position vector with respect to time once, and then take the second derivative right after that.
In the polar coordinate system, the position vector is

(Here r will just be a number, and r-hat is the direction vector.)
Now let’s differentiate this with respect to time.
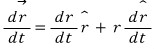
Did it! — but in Cartesian, the derivative of the basis vector was 0….. but as we saw above
the story has changed now!! hehe why????? because the basis vector is not always constant!!!!
So from now on, we

have to deal with this guy!!!
The unit vector representing the direction of r — if it were continu~~ously in the r direction, it wouldn’t change, but
when a change occurs in the unit vector,
the unit vector changed because it changed in the theta direction!!!!
Then

starting from the ‘direction’ of the change of, the change in the direction of that r-hat

can be explained by the direction of,
and because its magnitude is like this,

dividing both sides by Δt,

we can now describe dr/dt like this.
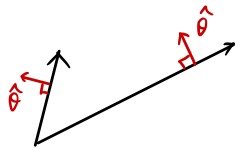
In the same vein,

for the unit vector representing this direction, the direction of change is

it’s this!!!!
Why minus????????
You get the feel at this point right????
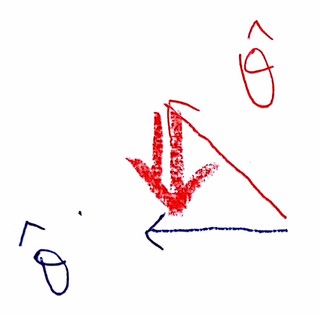
When theta is changing in the + direction, the direction of that change will be in the − r direction!!
This might not sink in well right now,
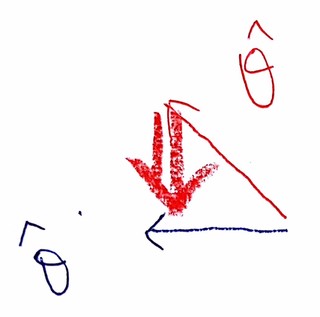
if we say that before the change is red, and after the change is blue,
the “change of the vector” is the bold red one, right??
So what I’m saying is that the vector representing the change of the theta-hat vector points toward the center.

So now let me shalalala write out the time derivative of the position vector!

Done~~~
Let’s attach and move on to acceleration! (sry for the gag)
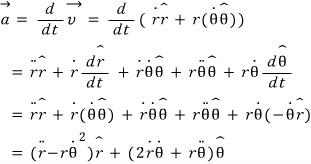
Don’t memorize it as a formula and use it~
Just derive it simply and that’s all.
So you get polar coordinates, but
what I taught before was coordinate transformations, right?????
Daaang so in that case shouldn’t I also teach the matrix that transforms from rectangular to polar coordinates???
— you might ask back,
it’s not introduced in the mechanics textbook, but you can solve it super easily with the Jacobian!!!
Search for Jacobian (or Yacobian)!! hehehehehe
There will be lots of other good writings, but if there’s a request, I’ll start writing right away!!
Well then, bb2~
Comments
Discussion happens via GitHub Discussions. You'll need a GitHub account to comment.