Oscillations and Damped Harmonic Motion
Springs are literally everywhere — turns out any potential looks like a spring up close, and that's why oscillations are SO important in physics!!
Right now I’m going at super-high speed… because the content is the exact~ same as what we learned in high school
the only difference is that the integrals are a little~~ more complex, so of course it feels easy, right????~~
BUT (BAM!!!!)!!!! Now it’s oscillation!!! This part is definitely going to be unfamiliar.
In high school we only did simple pendulum motion, right????? probably???
This oscillation part is super super super important, so I studied it hard!!!
Why~~ is it so important
Because in this world there are super super super many natural phenomena that can be approximated as springs!!
For example,
the reason a sound comes out when you hit a wall ☞ spring, go go
the reason the sky looks blue ☞ spring, go go
and the method to draw every~~~~~~~~~~~~~~~thing visible in front of our eyes is also
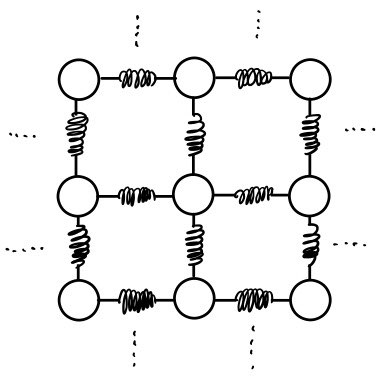
☞ spring…. hehe
Okay, enough intro, let’s dive in.
To express the exact~ same content as the intro above a little differently,
in this world there are complicated and various potentials
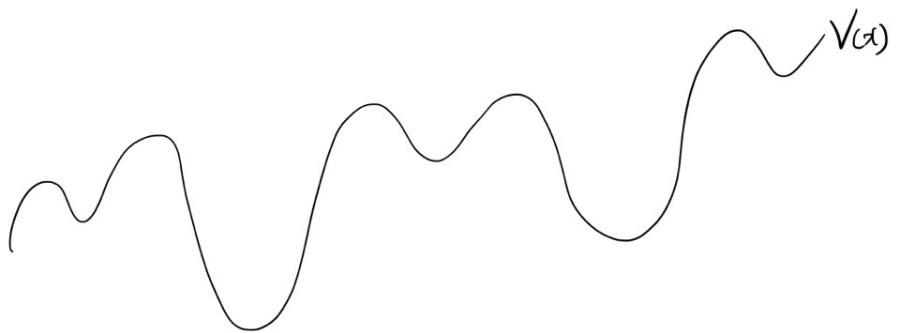
Let’s suppose there’s a potential like this. But!!! If we’re not looking at all x across the whole range
but only at the potential at some specific location~~~~~~~ then if we just do a Taylor expansion at that point,
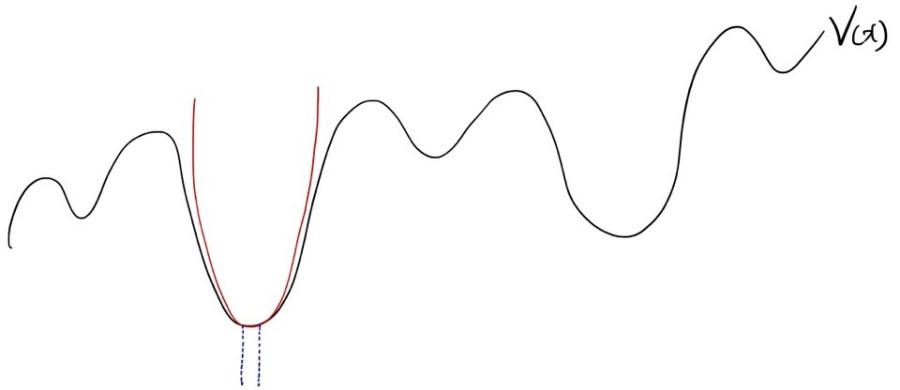
we can now express V(x) as the red quadratic function!!! Because at the exact x we’re curious about,
the red function and the black function are almost~~~~ the same!!!!!!!
Why is it so important that V(x) is quadratic in x….
Uh.. but… we learned something like this earlier..
we said that if you differentiate V(x) once with respect to x, you get F(x), right……????
If we only look at that chosen point, it can be viewed as a spring system.
If we briefly look at the equation of motion for a spring system
Differential equations special post
Differential equations special post.
If you’re a college STEM undergrad, you’ll encounter “(linear) differential equations” a freaking ton, so I’m going to post about this…
gdpark.blog
Okay, now let’s step just a little closer to reality!!!!
Let’s think about resistance like friction or air resistance! That’s what I mean!!!
Based on what we learned before, let’s assume the resistive force is linear in v! (Nonlinear is super complicated;;)
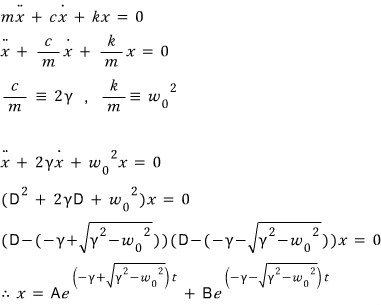
Okay then, I’ll set up the equation of motion! Instead of calling the coefficient C1 like before, I’ll just call it c~~~~~
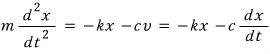
The equation of motion will be set up like this!!~~
And differentiation with respect to time is denoted by putting a dot on top of the head and called dot,
and differentiation with respect to space is denoted by drawing a little ppyong over by the ear and called prime
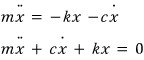
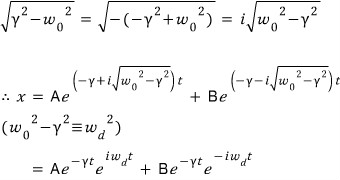
Solving this diff eq is also a linear second-order differential equation with constant coefficients!!
For this too it’d be better to check out my differential equation special!!
But there will definitely be people who don’t want to!!!
In that case, you can check Boas Mathematical Methods Chapter 8, Section 6!!!
(To understand Section 6 well, start from Section 3 and work through it step by step!!! It’s not hard at all)
<Hey hey hey hey hey!!!!!!!

what do we do if this!!!>
Yep, it’s simple!
<Hey hey hey hey hey!!!!!!!

what do we do if this!!!>
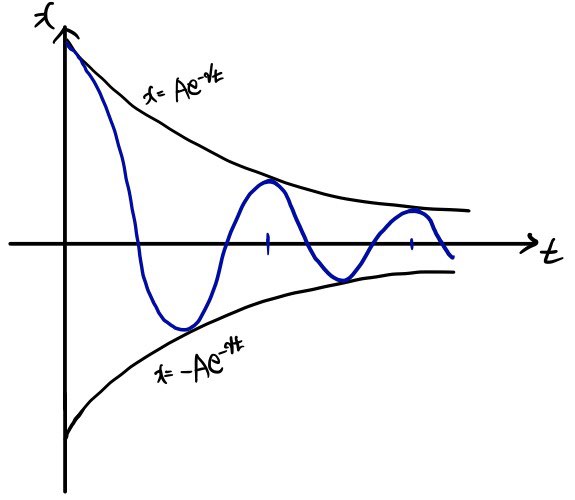
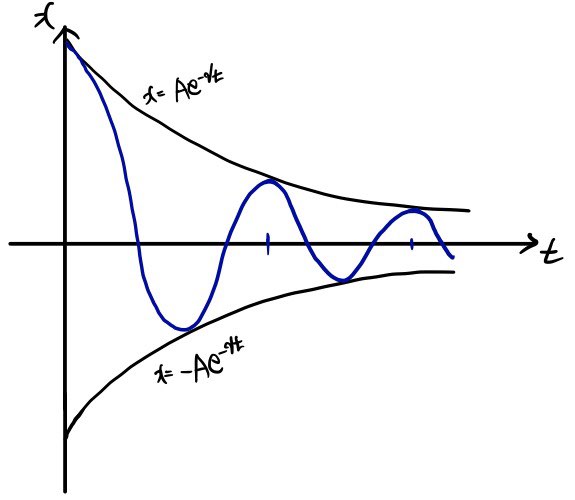
This is

this kind of damped harmonic motion
these are everyday-commonplace oscillations, right?
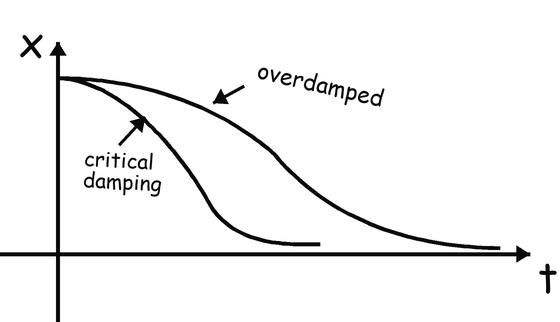
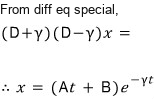
Overdamping is

Critical damping is

Alright! Here there’s something worth thinking about! It’s no big deal though;; hehe
Overdamping is an oscillation that returns to the original position somewhat gently~~~ over time! Where would this kind of oscillation be needed!??
Wouldn’t it be needed in an Equus? When you suddenly hit a bump, it goes pushuuung~ and sliiiiiiides back to the original position, so that’s what you want!!!!
Overdamping seems unconditionally good though??? Doesn’t seem like there’s any case where critical damping is needed??
Where would critical damping be needed????? In the case of a Speed Racer mega-ton supercar, rather than a pupupupushik-puuuuun shock absorber,
you’d need a shock absorber that returns to the original position in a short time!!!
Because, you need to quickly return to the original state, regain stability, and go back to high-speed racing, right??
hahahahahaha
Just to add a bit more, let’s reexamine once again from the perspective of Energy.
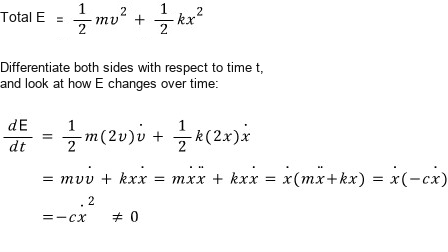
The fact that the “rate of energy change” is not 0 makes super super super much sense!!!!!
It was damped harmonic oscillation with resistance taken into account!!! Commonsensically, it will eventually stop oscillating
and then E decreasing is not a wrong statement!!
Comments
Discussion happens via GitHub Discussions. You'll need a GitHub account to comment.