Inertial and Non-Inertial Frames and the Galilean Transformation
Struggling through chapter 5 of General Mechanics I, we dig into what inertial and non-inertial frames actually mean and why Newton's 1st law is sneakier than it looks.
I’ve heard a lot that during General Mechanics I, this is the most important part and also not exactly easy,
and I came in having heard that chapter 5 is the first hurdle course of the general mechanics book… T_T
It deals with ‘rotation,’ which wasn’t covered to the point of making you puke back in middle/high school, so I find it hard, I do.
Ahh I dunno I dunno it’s hardddd….
Alright, first let’s think like this!
“What is a noninertial frame of reference?”
Then let’s nail down the inertial frame of reference precisely from the start.
I’ll spoil it first. “An inertial frame is a frame in which Newton’s second law holds.”
I want to say it’s a frame… anyway, spoiler done!
The story of the inertial frame actually starts from Newton’s first law. So when you think about it,
1st law: Law of inertia
When we first learn this, we’re taught it like: “One of the properties of objects is a characteristic called inertia.”
And situations like tripping over a stone, or falling over in a bus that suddenly starts moving.
It seems all too obvious.
Seems like there’s something more to it, right?
So let’s go further.
First, the 1st law is indeed about the property of inertia, that’s correct.
To put it more openly, ‘if there is no external force, the motion does not change.’
That is, things that are stopped try to stay stopped, and the fella of an object that is moving tries to maintain its state of motion,
and to unpack this even more, it’s saying that if there’s no external force, the acceleration is 0.
But this is so tied in with the 2nd law that, (I think I was like this too,)
when we learn it at school, don’t we understand the 2nd law first, and then understand the 1st law???
But why on earth did Newton call the law of inertia the 1st law and the law of acceleration the 2nd law?
It’s that the real meaning the 1st law is saying is
“There exists a ‘frame’ in which, if there is no external force, the acceleration is seen as 0.”
(Because only then does F=ma work,)
(Put another way, unless you’re in that frame, F=ma doesn’t work unless an inertial force term is added.)
(cf. The frame in which the acceleration is “not” seen as 0 even though there is no external force is precisely the bus frame.
The bus is sitting still, but the person suddenly gets a force and falls over……the bus must be bus-wildered…..it’s just sitting still……
(((Here, I think you can say you’ve understood ‘frame’ only if you properly understand the sentence “the bus is sitting still.”)))
And another thing you can catch is that, simply thinking about it, when we almost always set the origin of the inertial frame of reference,
we set it at the place where I am standing, that is, ‘Earth,’ right??? Earth is not an inertial frame of reference…..it’s a frame that is rotating and receives acceleration every moment….
But the reason why setting Earth as the origin of the inertial frame and explaining works is just that,
the effect from Earth’s revolution and rotation is so so so tiny……heh.
(Since we’re talking about Earth, the reason the 1st law needs to define that “this kind of frame exists” is that
in places doing rotational motion (accelerated motion) like Earth, none of Newton’s laws hold at all.
Since they just don’t hold at all, Newton smooths it over with the ‘inertial force.’
And then, what problem arose is that the problem of “am I rotating right now, or am I not rotating” arose, they say.
And at this point, starting the “absolute space” story is what’s originally correct.
The absolute space story starting from the bucket thought experiment.
But I’ll just stop at saying this much here.
But… um…. th…these concepts of Newton’s absolute space, absolute time… there was a lot of controversy afterwards too,
with the law of the invariance of the speed of light being conclusively revealed in Maxwell’s electromagnetic theory, starting to make people doubt,,,,
and Einstein just smashes it up, that’s right.
However, Newton’s mechanics, as everyone knows,
carries the significance of becoming a tool that “approximately” and conveniently represents very everyday physical phenomena…
Therefore, properly understanding Newtonian mechanics is definitely not meaningless….
Then let’s continue!!!
There’s this kind of frame, and first we define such a frame,
and then now we talk about the relationship between force and acceleration.
F=ma. (2nd law)
And as a characteristic of that force, every force has action and reaction. (3rd law)
But isn’t the 3rd law also vague??? It seems like a freaking obvious statement???
So I think the 3rd law should be stated like this
“If there’s action but no reaction, that’s not a force.” Just pinning it down at this level and moving on,
Newton’s laws are really the hardest I think…..
But I’ve heard that at the time, Principia was classified not as physics but as ‘philosophy’?
No wonder T_T
Anyway, what I originally wanted to talk about here was the inertial frame of reference,
did you get what an inertial frame of reference is?????
Oho… then now what is a noninertial frame (Noninertial frame)?!?!?!?
It’s just, a frame in which Newton’s 2nd law does not hold.
Easily (as was slightly mentioned above), a representative example is ‘an accelerating frame.’
But, this accelerating frame (naturally) does not satisfy Newton’s 2nd law.
So in this case (to protect Newton’s laws) an “inertial force” term appears.
And in this posting we’ll look at a simple inertial force term!!
Not the inertial force due to rotation, but the inertial force in real, just plain linear motion!
So first we need to know the Galilean transformation (gal-il-ee-an trans-formation).
First, a transformation is something you can think of as roughly ‘changing perspective.’
For reference, transformations are not just Galilean transformations.
In relativity, the Lorentz transformation appears..
Both are rotating the inertial frame which is the point of view,
but they differ depending on what is preserved.
The Galilean transformation preserves x^2 + y^2 + z^2.
Speaking from the perspective of Newtonian mechanics, because time is an absolute concept, it’s just completely left out,
and since the Lorentz transformation appeared to resolve the contradictions appearing in relativity,
it adds time, and the quantity it preserves is x^2 + y^2 + z^2 - t^2. This is the quantity called Lorentz invariant, which,
related note
Special Relativity Special #3. spacetime, Lorentz invariance
At the end of the previous posting I said I’d take a non-Euclidean geometric approach, right????? Yep I will do it but not yet…
related note
I covered it here…
What’s inside the dotted line is strictly for reference.
I don’t think deep consideration is needed here in classical mechanics,
just,,,,, well just mentioning that there’s something like this? and to make it more comfortable to understand….
that’s the purpose….hehe
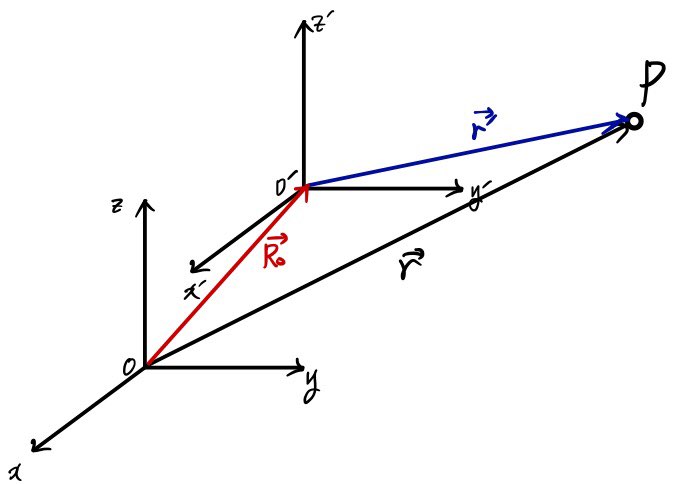
In the Oxyz coordinate system, the position of point P is described by r, and in the moving O’x’y’z’ coordinate system, the position of point P is described by r’.
Then the linkage of the two coordinate systems,

using this,

Now if we differentiate that equation sequentially,

V and A are the velocity and acceleration of the moving coordinate system, v and a are the velocity and acceleration of point P as seen from Oxyz,
and the velocity and acceleration of point P as seen from O’x’y’z’ are v’, a’.
Another important point is

if this is the case????
That means the moving coordinate system is in uniform motion or at rest, which means,

that is, if we consider that some object at point P has mass m, ma = ma’
that is, F = F’
What does this mean~
The force F seen from a stationary coordinate system (a physics student inside a stationary room) and
the force F’ seen by a uniformly moving coordinate system (a physics student inside a uniformly moving room) are the same!!
But if the acceleration of the moving coordinate system

is this, then,
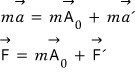
F and F’ are different!!!
A gap arises between the F of point P as seen by Oxyz and the F’ of point P as seen by O’x’y’z'
A gap of m-A-zero arises, and this term is called the “inertial force.”
This isn’t a force that arises from some special factor, it’s purely a gap stemming from a difference in perspective, so it’s awkward to call it a ‘force,’ and so
it might be more correct to call it a “fictitious force” hehehe
To add a little more, this is really funny….. there’s A outside the bus, and B inside the bus,
if the bus goes pop! and accelerates, B falls over…. why does B fall over… it’s explained by the inertial force.
But from B’s perspective, A also suddenly accelerates pop! But why does no inertial force arise for A???
Newton says this is because A is the absolute reference, and B is moving relative to it.
Then, there has to be some super absolute reference somewhere in the universe…
Newton says some absolute reference frame that cannot be measured exists…
With the bucket thought experiment I mentioned above…
This is shaping up like I’m going to say everything there is about Newtonian mechanics…
About this, I’ll study more and write a Newtonian mechanics special or something.
Anyway… it’s certain that Newtonian mechanics is absolutely not meaningless, so
this posting was just a preparation stage for the next posting.
A comprehensive recap of the Newtonian mechanics we learned in high school,
and then in the next, let’s understand well the inertial forces ‘related to rotation’ etc.! is about what it’ll be! hehehe See you in the next posting.
Comments
Discussion happens via GitHub Discussions. You'll need a GitHub account to comment.