Rotating Reference Frames: Coriolis, Transverse, and Centrifugal Forces
We figure out what happens when your coordinate system won't stop spinning — hello Coriolis, centrifugal, and transverse forces!
Let’s dive right in!
Previously, the coordinate system wasn’t rotating. (Actually we secretly assumed that lol)
And we found the discrepancy between a coordinate system that stays still and one doing translational motion (just straight-line motion).
So now let’s find out what kind of discrepancy there is between a coordinate system that stays still and one that does Only rotation!!!!
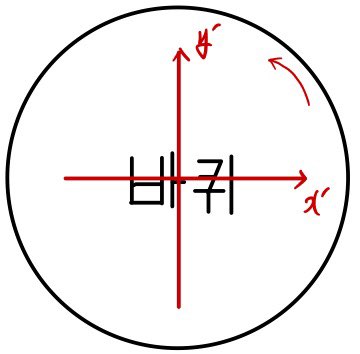
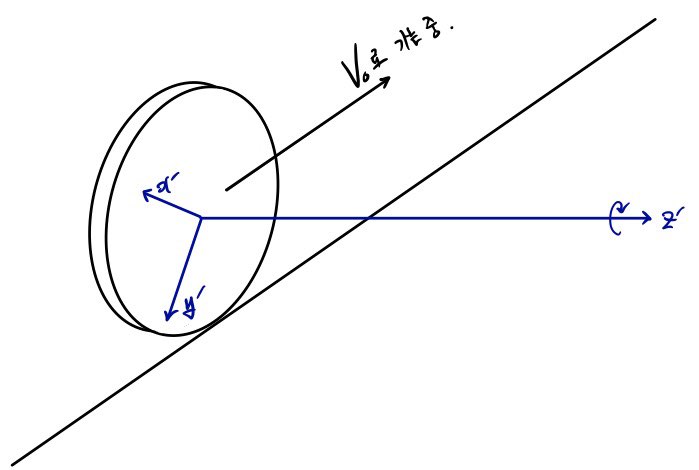
Let’s say we have a coordinate system Oxyz that stays still and a coordinate system Ox’y’z’ that only rotates.
(Since it only rotates, we can say that the two origins are the same!!!)
And for Ox’y’z’s direction of rotation, we can’t just say ‘clockwise lololol’!!!!!
The direction of rotation is
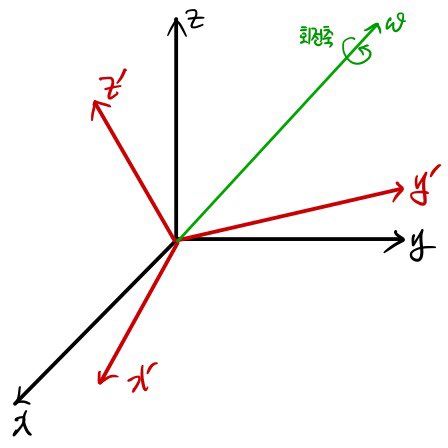
and the angular velocity vector omega is
let’s say hehehehe
Alright, we’ve established two different coordinate systems!!!! Now here,
because point O (origin) is the same, we can get the result that, from either coordinate system, the position vectors r and r’ of some point P are the same.
Now with this, like we did with the Galilean transformation, we’ll take successive derivatives and then find the discrepancy between a and a’!
So now we’ll take successive derivatives of the left and right sides!!!
There’s this difference.
this, even as time passes, is continuou~~sly
whereas
is different before and after as time passes!!! Because the coordinate system is spinning!!!
That is,
whereas
is what we have! So let’s take the derivative of both sides once~
And now,
let’s find out how on earth we can describe these guys that aren’t zero!!!!
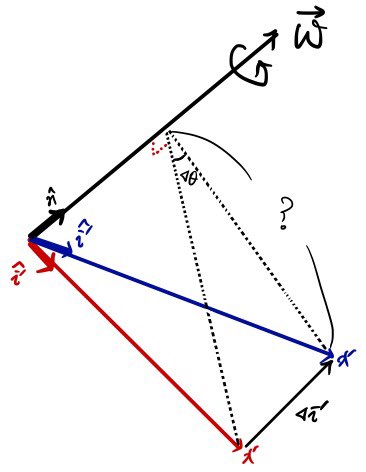
First, let’s figure out how i’ changes during time dt.
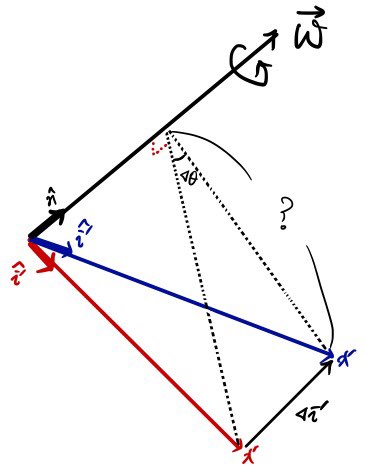
Let’s say it was red, and after time dt it turned blue.
Then ’the change in i’’ is

we can write it like this, right??
Over there

let’s describe the vector omega using this!!!
During time dt, it rotated by

so the magnitude of delta-i-prime is!!!!
How should we define that question mark ? over there?
Defining the angle Φ between x’ and n,

let’s say.
Therefore,
And then let’s divide by Δt and perform the limit operation sending delta-t to 0!!!

Hey, looks like we can make use of the cross product here?!?!?!?!?

We can write it like this!?!?!?!!
Aaaaaaaah nope, let’s be careful about the direction!!!!
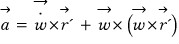
So the conclusion is
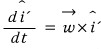
this is what we get. That is ~~~ by the same principle for the others too,
&&&&&
Yes!!!
So now let’s go back to the equation~!!! hehehe
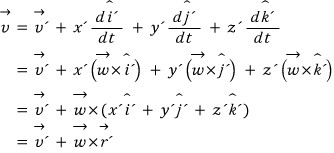
Wow! Neat!!! We found the discrepancy in velocity between the two coordinate systems!!
If we write that in derivative notation,
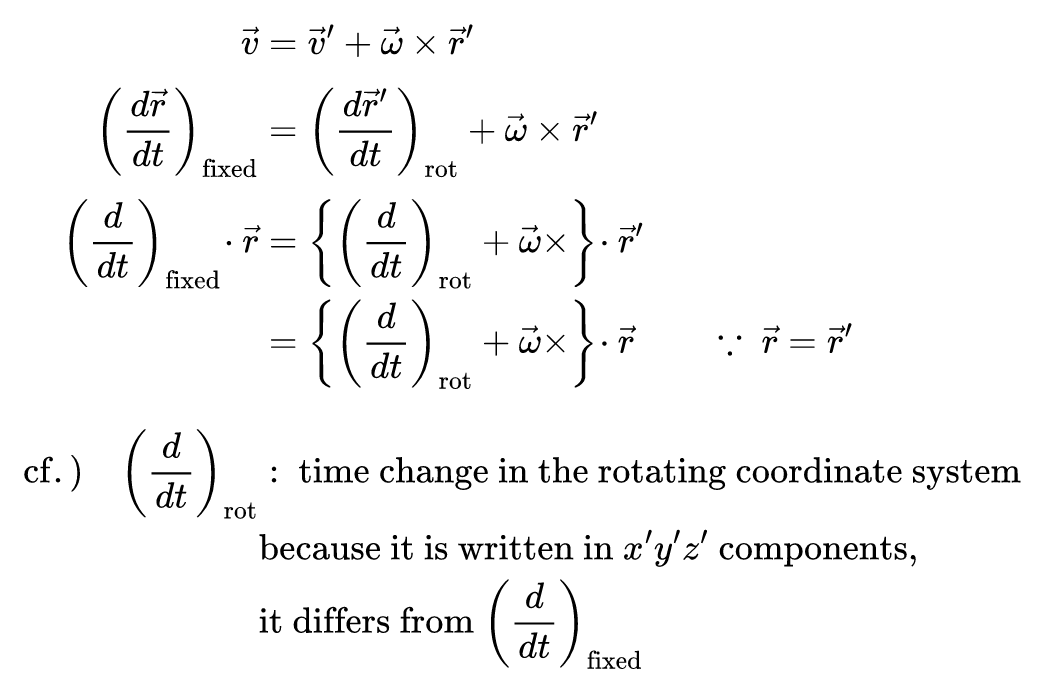
We found the con.nec.ting.link~~ between the fixed coordinate system and the rotating coordinate system!!
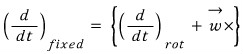
Let’s use it as an Operator between fixed and rotating!!!!
Using it as an operator means ~~ that it can be applied to any other arbitrary vector as well.
You can think of it as: some arbitrary other vector, what it looks like in the fixed coordinate system when viewed from the rotating coordinate system, something like that!!!
Since you can just stick any vector into it lol
Let’s put our velocity vector v in and find the acceleration vector.
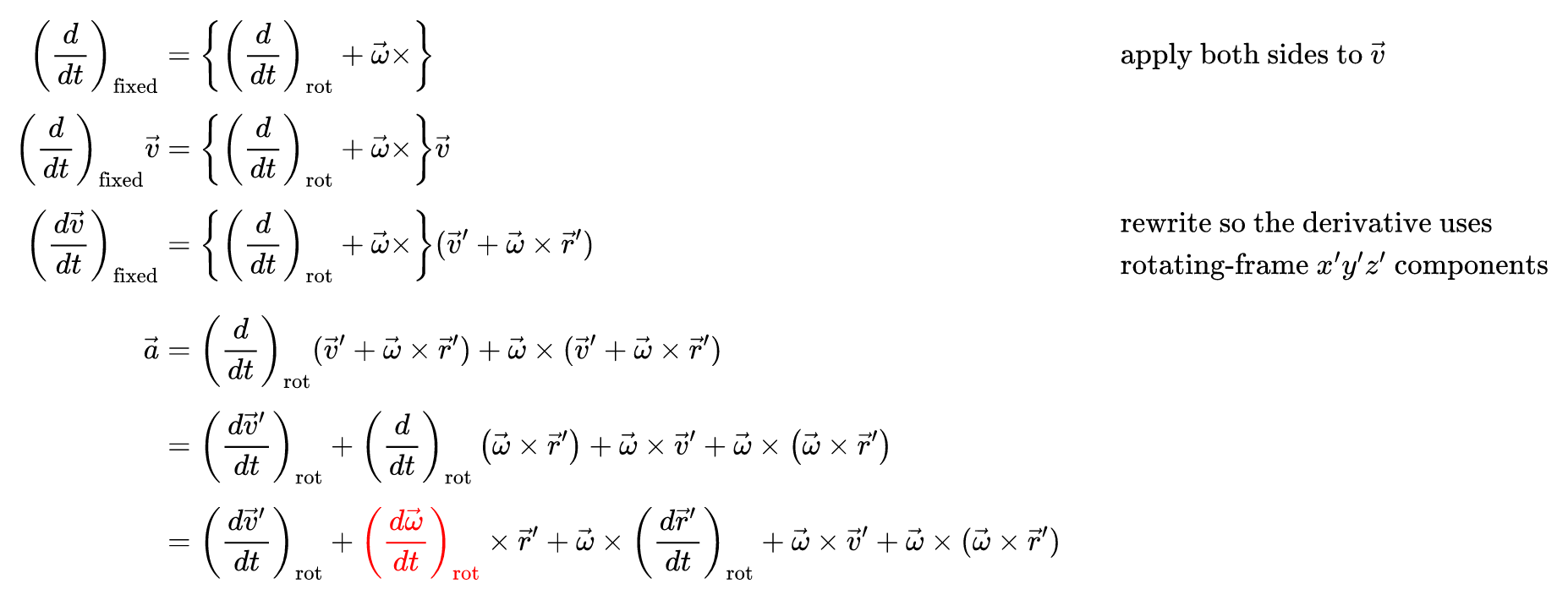
That red part over there is a bit off.
With d/dx(rot), you can’t just differentiate w expressed in coordinate-system components….. hehehe
So we need to handle the omega vector using the operator!!!
It’s not hard, let’s do it~
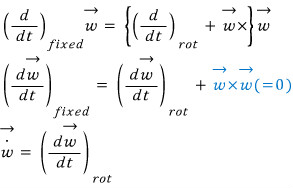
Because of this, we can write that as omega-dot!!!
It’s not just casually differentiated!!
Now let’s go to the final result!!!!!
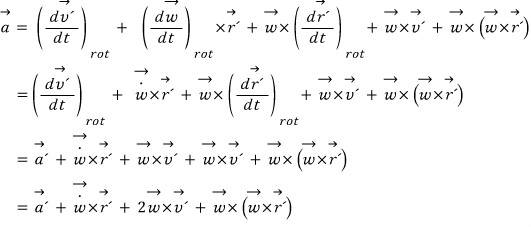
Let’s multiply both sides by mass m~ heh
Unlike when the coordinate system just does straight-line motion, a lot of fictitious force terms appear…….
Let’s tear them apart one by one~
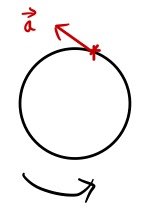
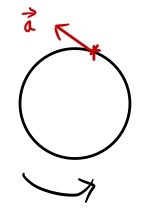
First!

is called the Coriolis force.
How should we intuitively understand this?
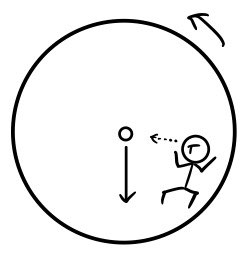
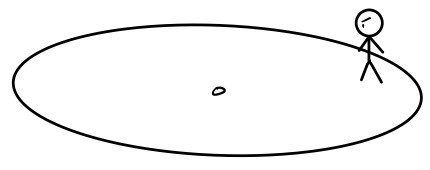
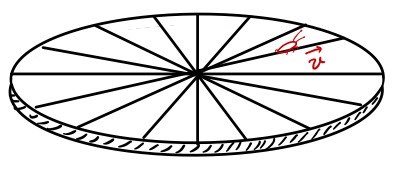
You drop a marble on a disk.
Someone looking from just the fixed coordinate system will see the marble drop straight from top to bottom, thud! right!
But that dude was Spider-Man.
Then, if he clings to the disk and watches the falling marble????
Probably a parabola??? is how it’ll look!!
Try to imagine it well…. if you can’t imagine it well, you’d better go ride a Disco Pang Pang (a spinning Korean carnival ride)!!!! hehehe

This term is called the transverse force
I’ll think about it like this
You’re standing like this, and if the disk is sud!!!!!!!!!!denly spun?? The person would lose their balance and fall over, right?
That’s exactly that force. hehehehe
Oh right. And if

then Naturally~ it doesn’t appear — you already knew that, right?

And well, this term is the familiar centrifugal force~~!!
Were you wondering why it didn’t come up??? The most familiar force to us!! hehehe The force pointing outward~~
Among amusement park rides, there’s one where you sit on the octopus legs and it spins you round and round,
and there’s this thing like a tent that opens and closes — you feel it a lot when you ride that..?!! lol
We’ve felt transverse force and centrifugal force (strongly) with our bodies,
but it seems like we haven’t (strongly) felt the Coriolis force….. hehe
The reason is, well

only when this is the case does the force arise,
and on something that’s spinning, well… it’s not easy for us to move, so I think we haven’t felt it strongly… hehe
We’ve now looked at “only rotation,”
so now let’s make it fly while rotating!!!!! hehehe (like a slider, maybe? lololol)
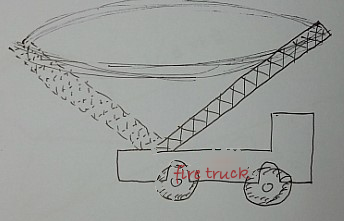
Or you can imagine something like this
It’s sitting still and suddenly a fire truck rotates its ladder,,,, hehehe? If up until now it was that kind of situation, now
the fire truck runs forward while doing that shit……. hehehe
But this situation isn’t very hard hehe
You just do “discrepancy with the rotating coordinate system” + “discrepancy with the moving coordinate system” from the fixed coordinate system, and that’s it heheh
So the relationship between the force F seen by an observer in an inertial frame and the force F’ seen by someone living in a non-inertial frame is!!!

Let’s solve a few problems and wrap up!!
Example 5.2.1
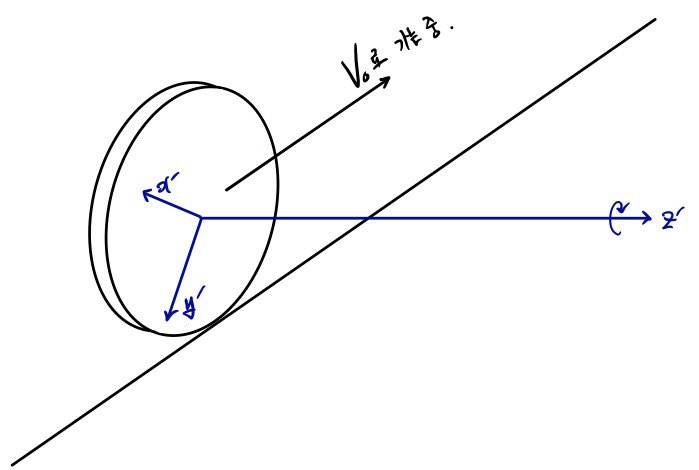
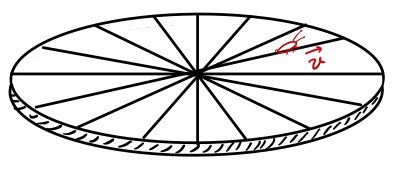
A wheel of radius b moves forward along the ground at constant velocity V0. Find the acceleration of a point on the wheel’s circumference with respect to the ground.
First, setting up the axes — nobody has any complaints about taking the O’x’y’z’ axis like that, right?
Now, what we need to find is
finding this, right? hehehe
Let’s call the position vector of that red point

..lololol
And since we said the radius of that little circle is b,

it would be this.
Now if we’re looking at the red point from the rotating blue axis, how would it look??
At least it’s not going to be “it looks like it’s rotating.”! hehehe

That’s it.
Then naturally

this as well hehe
Alright alright alright alright, and the omega vector is??????????

Now, since we’re being asked for the acceleration a with respect to the ground, let’s use that con.nec.ting.link operator!!!
If we write it all~~ out

it would be this, but let’s apply v’=0 and a’=0.
Then
But since it’s also doing uniform circular motion, dot(w) = 0!!!
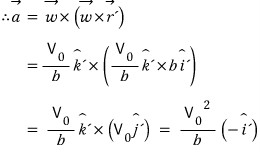
Done~~~
Example 5.3.1
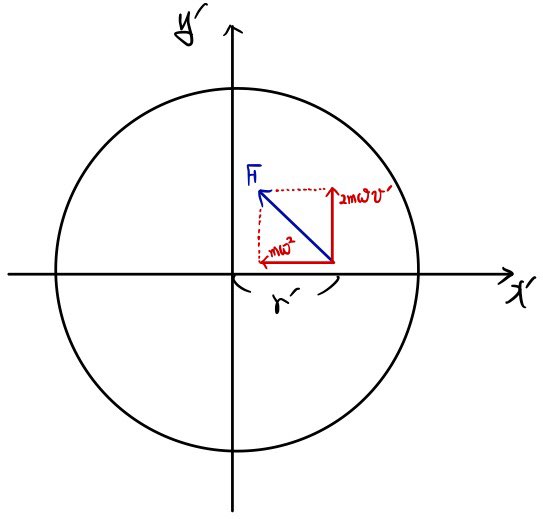
A bug is crawling outward at v’ along the spoke of a wheel that rotates at constant angular velocity w about a vertical axis.
Find the force acting on this bug~~~
You should spray insecticide, but before that~ lolololol
Looking at the problem, it seems like it’s asking how much centrifugal force, Coriolis force, and transverse force it experiences~~~
the problem is asking to figure that out.
First, let’s interpret the problem
This is a bicycle wheel. A little bug has stuck onto the wheel.
Ugh!!! hate them the most
The bug is crawling outward at v’, and in order to get rid of the bug
if I spin the wheel at a constant angular velocity w, how much force does the little bug receive,
and will it fall off as a result??? heh (easy to understand the problem right, hehe)
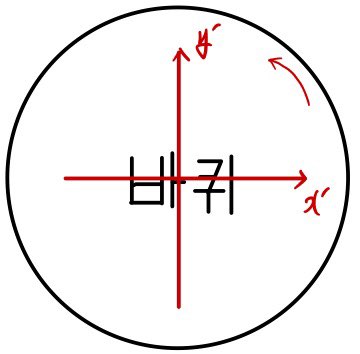
Let’s set the rotating axis like that and call the bug’s position vector

!

so it’s constant!!! Therefore

@@@@@
And when the wheel rotates, the angular velocity is

let’s say this.
<Hmm, it seems like we could also add a situation where the wheel is rolling forward,,,hehehe? Weird>
Alright so then
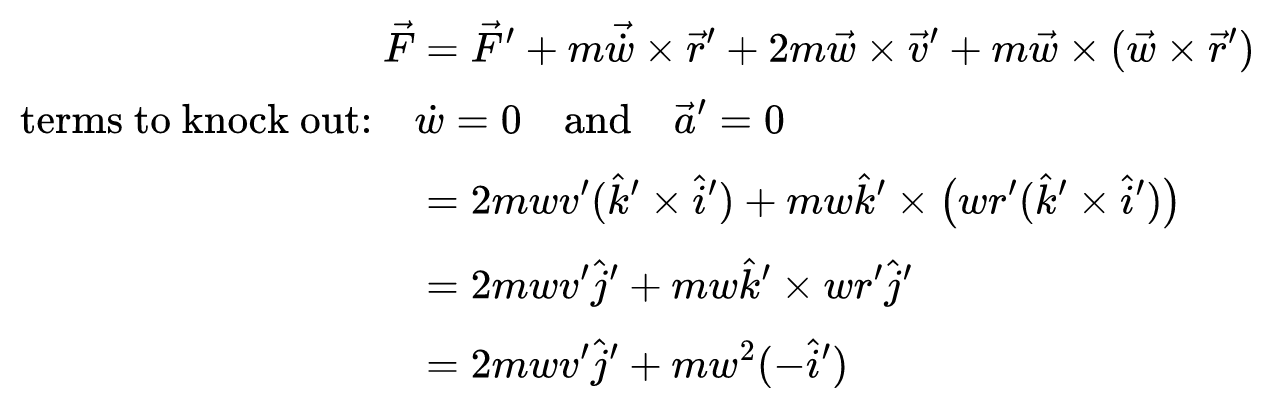
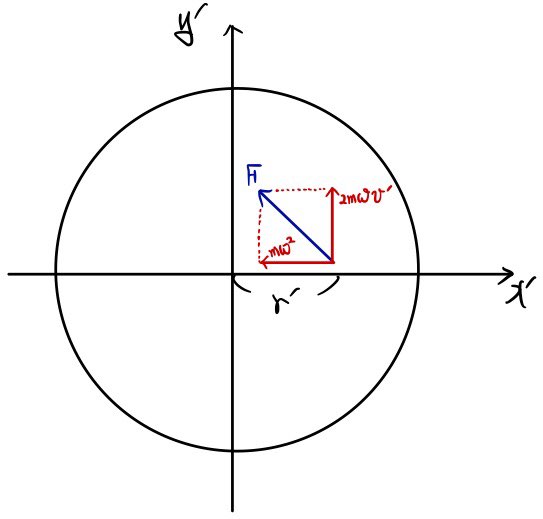
It was receiving a force F equal to the blue part!!!!!
Let’s find the magnitude of this force F once hehehe

Aha~ If this little bug doesn’t fall off, we need to make w bigger so it receives a bigger force!!!!
And if this guy stays still, v’=0 and the force it receives gets drastically reduced….
Still, it depends on r’ times w squared, but it seems like we’d have to spin it crazy hard for the kid to fall off
yeah right — my ass, insecticide is just the answer lolololol
hahahahaha this is fun
Well then, see you next time~~~!! lololol
My “General Mechanics Vol. I that I studied” is almost coming to an end! hehehehe
Comments
Discussion happens via GitHub Discussions. You'll need a GitHub account to comment.