Moment of Inertia: Perpendicular Axis Theorem and Parallel Axis Theorem
A casual, build-it-up walkthrough of moment of inertia for flat rigid bodies, covering why it acts like rotational mass and how the perpendicular and parallel axis theorems let you shift between axes.
Today we’re rotating a rigid body.
(Fixed axis. And for now, a flat rigid body — a plane lamina.)
ok ok go go go go
So we’ve got this rigid body,
and I’ll slap down coordinate axes like this.
(The z-axis is poking straight out of your monitor at your face.)
Now, since we’re rotating the thing, let me lay out all the rotation variables and actually draw the picture:
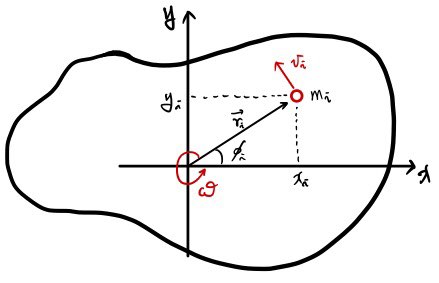
It’s a rigid body, so it’s made of a bazillion particles, and I’ll call the $i$-th one $m_i$. ($m_i$ sits at $(x_i, y_i, 0)$.)
You already know the linear velocity of each little $m_i$ is $\omega \cdot r_i$, right?
$$\overrightarrow{v}_{i}\quad =\quad \overrightarrow{\omega}\times\overrightarrow{r}_{i}\quad =\quad \left(|\omega|\cdot|r_{i}|\sin\theta\right)\hat{n}$$(It’s always 90 degrees here, so the sine just becomes 1.)
OK, now let’s compute the kinetic energy from the rotation. Just add up every particle’s energy:
$$T\quad =\quad \sum\frac{1}{2}m_{i}v_{i}^{2}\quad =\quad \sum\frac{1}{2}m_{i}(\omega\cdot r_{i})^{2}\\ \quad =\quad \frac{1}{2}\left(\sum m_{i}r_{i}^{2}\right)\omega^{2}$$Whoa!!!! Hold on!!!!
In translational motion, kinetic energy is (one-half)(M)(v squared).
But when I crunch out the kinetic energy of rotation… it’s (one-half)(that red thingy)(angular velocity squared). Look at the shape of that.
Isn’t that red blob basically playing the role of mass, but for rotation?!
Mass in translational motion is what we called inertia. So that red blob is like… rotational inertia?!
(We’ll walk through what that actually means below.)
$$T\quad =\quad \frac{1}{2}\left(\sum m_{i}r_{i}^{2}\right)\omega^{2}\quad =\quad \frac{1}{2}I_{z}\omega^{2}$$So — let’s define that red-underlined blob as the moment of inertia about the z-axis, $I_z$.
($r_i$ here is the distance from the z-axis — the rotation axis!!!)
But hold the receipts. Remember the setup: we just derived this under two constraints — it’s a flat plate, and the axis is fixed. And “moment of inertia” is the name we just agreed to stick on this thing. Don’t forget any of that…
OK, writing it out cleanly:
$$I_{z}\quad :\quad \text{moment of inertia about the z-axis}.\\ I_{z}\quad =\sum\quad(\text{mass of the i-th particle})\cdot(\text{distance of the i-th particle from the z-axis})^{2} \\ \quad \\ I_{\text{whatever}}\quad =\sum\quad(\text{mass of the i-th particle})\cdot(\text{distance of the i-th particle from the 'whatever' axis})^{2}$$The reason moment of inertia matters — like I previewed up there — is that in rotation, there’s some “something” playing the same role mass plays in plain old translational motion.
$$(\text{angular momentum})\ L_{z}\quad =\quad I_{z}\omega\\ (\text{torque})\ N_{z}\quad =\quad I_{z}\dot{\omega}\\ (\text{rotational KE})\ T_{z}\quad =\quad \frac{1}{2}I_{z}\omega^{2}$$Look at that. Exactly the same shape. The only swap is: $v$ becomes $\omega$ (since $\omega$ is the “speed” of rotation).
$p = mv$
$F = ma$
Right?!?!?!!!
There it is — the mirror with translational motion. In translation, velocity is $v$; in rotation, it’s $\omega$. And the thing playing the role of mass? Moment of inertia.
So let me belabor the “plays the role of mass” thing for a sec.
When you apply some force (well — torque, turning force) to a thing, the thing with larger moment of inertia gets a smaller angular velocity for the same push.
(Which is exactly how mass works in translation — hit two things with the same force and the heavier one barely budges. Same deal, heh.)
Aha~! So yeah, you can just mentally file moment of inertia $I$ under “mass, but for rotation.”
Now let me squeeze on this the same way we squeezed on center of mass.
Go look at the formula again.
We took each point mass’s mass, squared its distance from the rotation axis, and added them all up.
(Sadly, we didn’t divide by total mass, so unlike center of mass this isn’t an average. ;_;)
But notice — each of those squared distances is multiplied by something. And that something is the mass of that particular point mass.
Meaning: each distance has a “weight” attached to it.
Two masses at the same distance don’t contribute the same if one is heavy and one is light — the heavy one gets weighted more. That’s what the $m_i$ factor is doing.
We added up all those weighted squared-distances. That sum — that’s what we’re calling moment of inertia.
OK I’ll stop belaboring the meaning there.
As for why it’s the distance squared… honestly, just — the same way universal gravitation turned out to follow an inverse-square law, this thing that plays mass’s role in rotation turns out to follow a square law too. File it as one of those “huh, nature’s like that” discoveries.
OK, fun fact about rigid body rotation:
$$I_{z}\quad =\quad \sum m_{i}r_{i}^{2}\quad =\quad \sum m_{i}\left(x_{i}^{2}+y_{i}^{2}\right) \\ =\quad \sum m_{i}x_{i}^{2}\quad +\quad \sum m_{i}y_{i}^{2} \\ \ll I_{\text{whatever}}\quad =\sum\quad(\text{mass of the i-th particle})\cdot(\text{distance of the i-th particle from the 'whatever' axis})^{2}\gg \\ =\quad I_{y}+I_{x} \\ \therefore\quad I_{z}\quad =\quad I_{x}+I_{y}$$«Ohhh, this is the stuff I love about physics. Isn’t this kind of thing just… the wonder of nature? haha am I wrong? haha»
This is the perpendicular axis theorem.
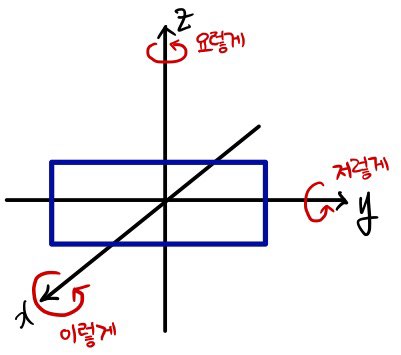
$I_z = I_x + I_y$
The moment of inertia when you rotate “this way” equals the sum of the moments of inertia when you rotate “that way” and “the other way”!
And if you squint at it — does it really~~ need to be the x, y, z axes specifically?
Axes are something you picked, right??
So the real conclusion: the moment of inertia of a flat plate about any axis perpendicular to it equals the sum of the moments of inertia about any two mutually perpendicular axes lying in the plate, passing through the point where the perpendicular axis meets the plate.
That’s the perpendicular axis theorem.
OK — remember when we did center of mass, how we kept re-centering everything on the CM?
Let’s do that again, this time with a flat plate.
We have a flat plate spinning about the z-axis. (Rigid flat plate. Plate plate plate plate.)
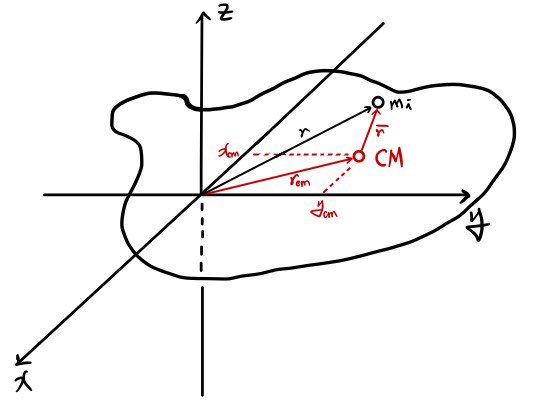
Let the center of mass sit at $(X_{cm}, Y_{cm}, 0)$.
Writing position vectors re-centered on the CM is something we’ve done a bunch, so I’ll just drop the equation. heh
$$I_{z}\quad =\quad \sum m_{i}\left(x_{i}^{2}+y_{i}^{2}\right)\quad =\quad \sum m_{i}\left\{(\overrightharpoonup{x}_{cm}+\overrightharpoonup{\bar{x}}_{i})^{2}+\quad(\overrightharpoonup{y}_{cm}+\overrightharpoonup{\bar{y}}_{i})^{2}\right\} \\ =\quad \sum m_{i}(\overrightharpoonup{x}_{cm}^{2}+\overrightharpoonup{y}_{cm}^{2})\quad +\quad \sum m_{i}(\overrightharpoonup{\bar{x}}_{i}^{2}+\overrightharpoonup{\bar{y}}_{i}^{2})\quad \\ \quad +\quad 2\overrightharpoonup{x}_{cm}\sum m_{i}\overrightharpoonup{\bar{x}}_{i}\quad +\quad 2\overrightharpoonup{y}_{cm}\sum m_{i}\overrightharpoonup{\bar{y}}_{i}$$(The red cross-terms dying to zero is getting old at this point, haha.)
So:
$$I_{z}=\sum m_{i}(\overrightharpoonup{x}_{cm}^{2}+\overrightharpoonup{y}_{cm}^{2})\quad +\quad \sum m_{i}(\overrightharpoonup{\bar{x}}_{i}^{2}+\overrightharpoonup{\bar{y}}_{i}^{2})$$Look at the back term first. Inside the parentheses is $\bar{r}_i^2$.
Aha!! That’s the moment of inertia you’d get if you ran an axis through the CM parallel to the z-axis! So that pink-pink pink (pink) term is $I_{cm}$.
Now the front term — the green-green green (green) one — is $X_{cm}^2 + Y_{cm}^2$. By Mr. Pythagoras that sum is $r_{cm}^2$. And since it has nothing to do with $i$, it slides right out of the sigma. What’s left is just $\sum m_i = M$ (total mass), giving us $M r_{cm}^2$.
And $r_{cm}$ is just the distance between the z-axis and the CM — let’s call that distance $l$.
So:
$$I_{z}\quad =\quad M l^{2}+\quad I_{cm}$$Whoa. This one is also wild.
This is the parallel axis theorem:
“The moment of inertia of a rigid body about an arbitrary axis equals the moment of inertia about a parallel axis through the center of mass, plus the product of the total mass and the square of the distance between the two axes…!!!”
And for the record — this parallel axis theorem, unlike the perpendicular axis theorem above, works for any rigid body, not just flat plates!!!!!!
So if the moment of inertia about some arbitrary axis is a pain to compute, but the moment of inertia through the CM is easy? Use this equation. heh.
Originally written in Korean on my Naver blog (2015-01). Translated to English for gdpark.blog.