Rigid Body in Planar Motion
Fixed-axis rotation is so last chapter — now the axis itself moves, and we figure out exactly when that messy extra torque term thankfully drops to zero.
Today… I’m literally crying. Tears. T_T
Up till now every rotation we did was around a fixed axis. But now — now it looks like we have to let that fixed axis go… (sob)
The rotation axis moves now.
OK. Deep breath. Let me write angular momentum out again first.
$$\overrightharpoonup {L}\quad =\quad \sum {\quad}\overrightharpoonup {r}_{i}\times m_{i}\overrightharpoonup {v}_{i}$$Derivative of momentum — the rate of change with respect to time — was what again? Force, right?? Right.
So since this is angular momentum, its derivative is the rotational version of force — torque. So:
$$\overrightharpoonup {N}\quad =\quad \frac {d}{dt}\overrightharpoonup {L}\quad =\quad \frac {d}{dt}\sum {\quad}\overrightharpoonup {r}_{i}\times m_{i}\overrightharpoonup {v}_{i}\quad or\quad \sum {\quad}r_{i}\times F_{i}$$Now, the thing is, we have to look at the rotating particle system again.
Since we’re in “rigid body undergoing planar motion” territory now, I’m gonna introduce a new origin $O'$ — the origin of the coordinate system we’ll use when we care about the rotation of the particle system.
$O$ is the origin of the inertial frame (the coordinate system that sees everything like plain old straight-line motion).
«Oh, and — let’s leave the door open for $O'$ to be accelerating with respect to $O$, too~»
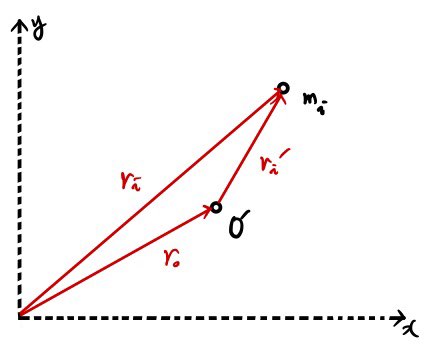
Each vector works like this.
OK, now let’s compute the total torque $N'$ around the $O'$ axis.
$$\overrightharpoonup {N}'\quad =\quad \sum {\quad}\overrightharpoonup {r}'_{i}\times \overrightharpoonup {F_{i}}\\ =\quad \sum {\quad}\overrightharpoonup {r}'_{i}\times \frac {d}{dt}m_{i}(\overrightharpoonup {v}_{o}+\overrightharpoonup {v}_{i})$$$$\text{Rearranging the above,}\\ \overrightharpoonup {N}'\quad =\quad -\overrightharpoonup {\dot {v}}_{o}\times \sum {\quad}m_{i}\overrightharpoonup {r}'_{i}\quad +\quad \frac {d}{dt}\sum {\quad}\overrightharpoonup {r}'_{i}\times m_{i}v'_{i}\\ \quad =\quad -\overrightharpoonup {\ddot {r}}_{o}\times \sum {\quad}m_{i}\overrightharpoonup {r}'_{i}\quad +\quad \frac {d}{dt}\overrightharpoonup {L}'$$Look at that — unlike the fixed-axis case, a new red term shows up. heh. But wait —
Notice that if the rotation axis moves at constant velocity, that term is 0, right?
So that red term is basically the extra thing you pay when the rotation axis is accelerating. heh heh hehe.
Let me lay out the cases where that red term drops to 0:
$$i)\quad \ddot {r_{o}}\text{ goes to 0 — then the whole thing is 0. (i.e., the rotation axis has zero acceleration)}\\ ii)\quad \sum {m_{i}\overrightharpoonup {r}'_{i}}=0\text{ — this is the case where }O'\text{ is the }CM\text{. (the thing we've been doing all along)}\\ iii)\quad \text{the }cross\text{ }product\text{ is 0??? (i.e., the angle between the two vectors is 0)}$$Let me show you one example of case (iii).
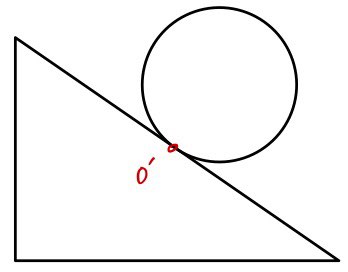
When something’s rolling down like this and the contact surface is $O'$, the acceleration of $O'$ points along the centripetal direction —
and $\sum m_i \overrightharpoonup{r}'_i$ also points toward that same center (the CM)!!
So when the rotation axis’s acceleration points toward the CM, the angle between those two vectors is 0 degrees.
$\sin\theta = 0$, cross product = 0.
And so — red term = 0. ^^ heh heh.
Originally written in Korean on my Naver blog (2015-01). Translated to English for gdpark.blog.