Three-Dimensional Motion of a Rigid Body
We level up from flat pancakes to sweet potatoes — spinning a 3D rigid body on an arbitrary axis and cooking up the full inertia tensor from direction cosines.
Last time the rigid body was stuck in a plane. Now? Three dimensions. We’ve leveled up.
So if before we were playing with a flat pancake of a rigid body, today’s toy is a sweet potato.
Rotation of a rigid body about an arbitrary axis
Let’s really get into it. Jab an arbitrary axis through the sweet potato and spin the thing.
First thing we always want in rotation problems — moment of inertia. That was the main character.
$$I = \sum_i m_i r_i^2$$right?
But now it’s a 3D rigid body, so there’s a little twist compared to the planar case.
Here’s what I mean.
Moment of inertia — the idea was: take the distance from the axis, square it, weight it by $m_i$, and add up over all the little pieces. Heh. Right?
If you remember that — the key phrase is “distance from the axis.” Not distance from the origin. Distance from the axis.
Ahh.
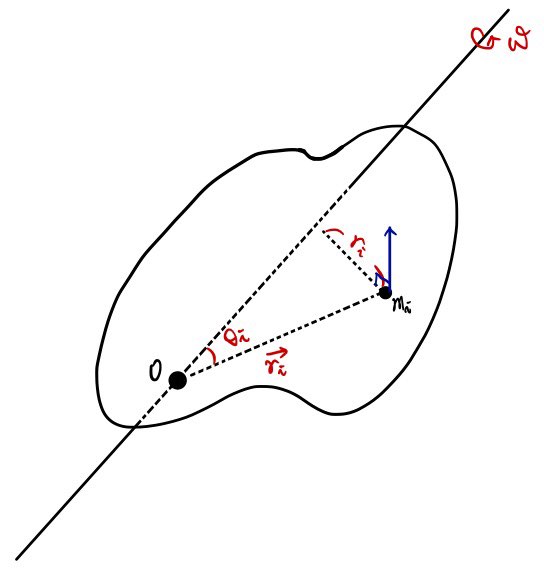
So if our reference point is the origin $O$, and the angle between $\vec{r}_i$ and the axis is $\theta_i$, then multiplying by $\sin\theta_i$ gives us $r_{i\perp}$ — the actual perpendicular distance from $m_i$ to the axis. You see it, right?
$$\left| r_{i\perp} \right| \quad =\quad \left| r_{i}\sin\theta_{i} \right| =\quad \left| \vec{r}_{i}\times \hat{n} \right|$$where $\hat{n}$ is the unit vector pointing along the axis. OK, now that formula makes sense too!
Now let’s mess with it.
Before we mess with it though — let me write $\hat{n}$ using direction cosines.
Direction cosines… those things you learned back in high school math II. Yeah, those.
The way I think about it: you take a direction vector and describe it by the angles it makes with the $x$, $y$, and $z$ axes. That’s it.
Everybody’s gonna have to dig up some buried memories for this one. Heh heh.
$$\hat{n}=\hat{i}\cos\alpha +\hat{j}\cos\beta +\hat{k}\cos\gamma$$And $\vec{r}_i$ in $xyz$ coordinates is just
$$\vec{r}_{i}=\hat{i}x_{i}+\hat{j}y_{i}+\hat{k}z_{i}$$So cranking out the cross product:
$$\therefore \vec{r}_{i}\times \hat{n}\quad =\quad (y_{i}\cos\gamma -z_{i}\cos\beta )\hat{i}+(z_{i}\cos\alpha -x_{i}\cos\gamma )\hat{j}+(x_{i}\cos\beta -y_{i}\cos\alpha )\hat{k}$$Yoho.
$$\left| \vec{r}_{i}\times \hat{n} \right|^{2}\quad =\quad r_{i\perp}^{2}\quad =\quad (y_{i}\cos\gamma -z_{i}\cos\beta )^{2}+(z_{i}\cos\alpha -x_{i}\cos\gamma )^{2}+(x_{i}\cos\beta -y_{i}\cos\alpha )^{2}\\ \quad =\quad (y_{i}^{2}+z_{i}^{2})\cos^{2}\alpha +(z_{i}^{2}+x_{i}^{2})\cos^{2}\beta +(x_{i}^{2}+y_{i}^{2})\cos^{2}\gamma\\ \quad -\quad 2y_{i}z_{i}\cos\beta \cos\gamma -2z_{i}x_{i}\cos\gamma \cos\alpha -2x_{i}y_{i}\cos\alpha \cos\beta$$OK, all the ingredients are prepped. Let’s cook up $I$.
$$I=\sum r_{i\perp}^{2}m_{i}\quad \text{just plug it in}\\ =\quad \sum m_{i}(y_{i}^{2}+z_{i}^{2})\cos^{2}\alpha +\sum m_{i}(z_{i}^{2}+x_{i}^{2})\cos^{2}\beta +\sum m_{i}(x_{i}^{2}+y_{i}^{2})\cos^{2}\gamma\\ \quad -2\sum m_{i}y_{i}z_{i}\cos\beta \cos\gamma -2\sum m_{i}z_{i}x_{i}\cos\gamma \cos\alpha -2\sum m_{i}x_{i}y_{i}\cos\alpha \cos\beta$$Doesn’t the first row look super familiar?? Like we’ve seen those three sums a million times already?
Yup. Those are exactly the moment of inertia about the $x$-axis, about the $y$-axis, and about the $z$-axis~~~
$$\text{From here on though, notation-wise:}\\ \text{moment of inertia about the }x\text{-axis}\quad :\quad I_{xx}\\ \text{moment of inertia about the }y\text{-axis}\quad :\quad I_{yy}\\ \text{moment of inertia about the }z\text{-axis}\quad :\quad I_{zz}\\ \text{we're gonna write them this way.}$$Now the second row — the part I haven’t seen before. Brand new creature.
But if you just squint at the dimensions, it kind of looks like moment of inertia, doesn’t it?
So people went ahead and gave it a name: the product of inertia.
$$-\sum m_{i}y_{i}z_{i}\quad =\quad I_{yz}\quad =\quad I_{zy}\quad \text{(by definition)}\\ -\sum m_{i}z_{i}x_{i}\quad =\quad I_{zx}\quad =\quad I_{xz}\\ -\sum m_{i}x_{i}y_{i}\quad =\quad I_{xy}\quad =\quad I_{yx}$$What’s this thing actually measuring? Apparently — it’s a measure of how asymmetric the body is with respect to the rotation axis.
You can think of it as: how faaar off you are from a principal axis (principal Axis), which we’ll get to later.
Once we hit that part, it’ll click. Don’t worry.
Rough sketch of “principal axis” for now (full version coming later):
A principal axis is an axis about which the rotating body comes out symmetric w.r.t. all three axes ($x$, $y$, $z$).
Say you’ve got something like my pencil case. Someone points at it and goes, “where’s a principal axis?”
Easy — I’d point right here:
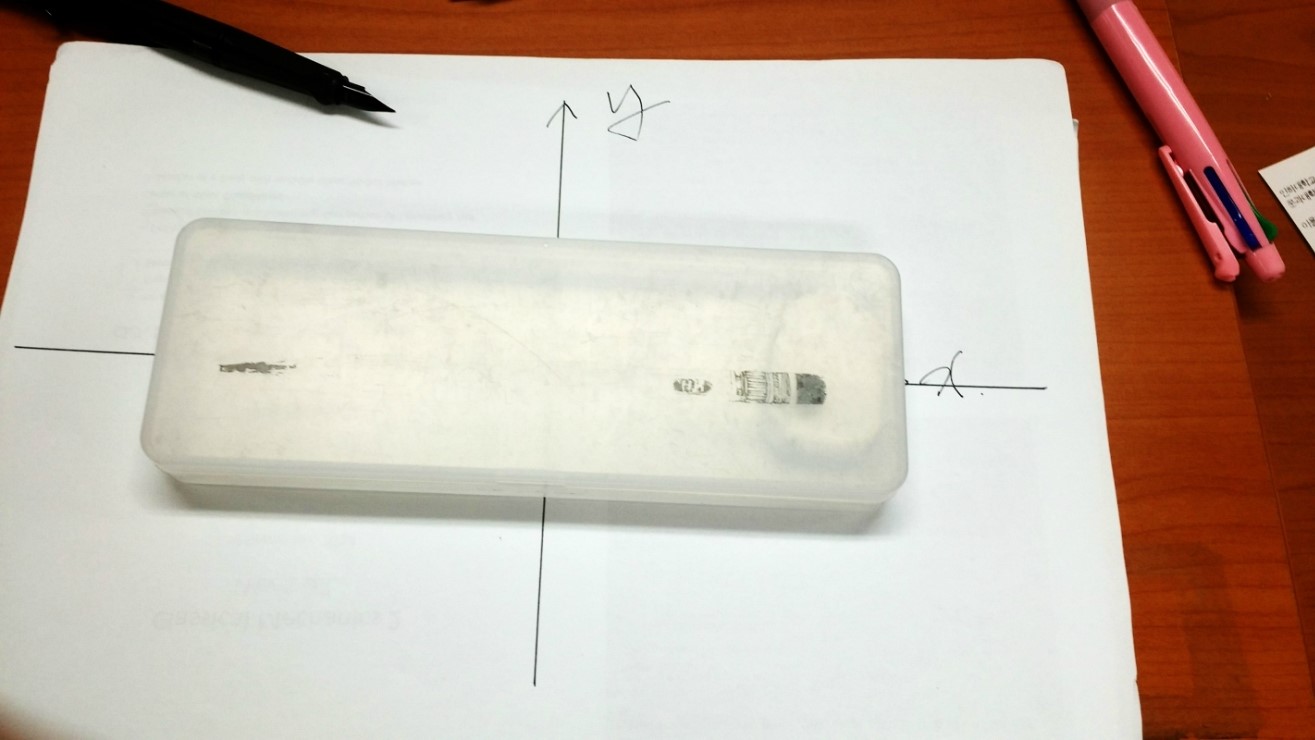
This is a principal axis.
Because it’s symmetric about the $x$-axis, symmetric about the $y$-axis, and symmetric about the $z$-axis. Triple symmetric.
But for a pencil case, you can just eyeball it and go “yep, right there~” Done.
What about the sweet potato though???? Where’s its principal axis? Oh yeah — I have no clue either.
That’s when you whip out the product of inertia — you hunt for the axes where all the products of inertia go to $\sim 0 \sim$.
How? Integration, obviously.
$$I_{xy}\quad =\quad -\int xy\, dm$$OK, and because I hate dragging that summation sigma around every time I write moment of inertia (it just looks needlessly busy), let me rewrite the whole thing using our new shorthand:
$$I\quad =\quad I_{xx}\cos^{2}\alpha \quad +\quad I_{yy}\cos^{2}\beta \quad +\quad I_{zz}\cos^{2}\gamma\\ \quad +2I_{yz}\cos\beta \cos\gamma \quad +2I_{zx}\cos\gamma \cos\alpha \quad +\quad 2I_{xy}\cos\alpha \cos\beta$$Originally written in Korean on my Naver blog (2015-01). Translated to English for gdpark.blog.