Principal Axes of a Rigid Body
A fun intro to principal axes of a rigid body — why they matter, how products of inertia vanish, and all the notation conventions that come with them.
Today’s topic: the principal axis of a rigid body!!! Principal Axis heh (not a swear word, I promise).
We touched on this thing briefly before — let’s actually dig into it now.
Hmm, when did it come up? Right — back when we were talking about products of inertia, the principal axis snuck into the conversation for a sec.
Back then I slapped a photo of some ridiculous pencil case in there lol.
Today let’s make it a sweet potato. Sweet potato, sweet potato, sweet potato.
OK so, let’s set up x, y, z axes on the sweet potato!!! However we want!!!
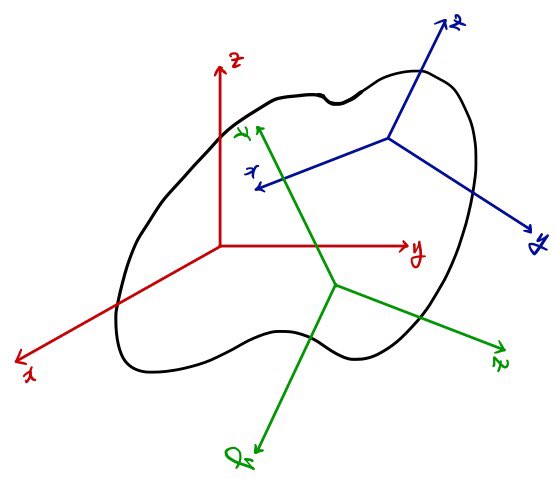
Here’s the thing I want you to notice: you can set these axes any way you like.
Red? Fine. Blue? Fine. Green? Also fine.
Right??
Now think about the components of the moment of inertia tensor.
Take, for example, the product of inertia $I_{xy}$:
$$I_{xy}\quad =\quad \int {\quad}xy\,dm$$Since it looks like that…
AHA!!! The components of the moment of inertia tensor depend on how you set your axes!!!
So for that sweet potato — there are thousands, tens of thousands, hundreds of millions, quadrillions of ………
…basically infinitely many ways to set the axes.
And among those infinitely many choices, there’s always some axis for which $I_{xy}$, $I_{xz}$, $I_{zy}$ are all three zero.
That~~~ axis, my friend, is the Principal Axis!! Make sense??
(For reference — apparently in moooost cases, we take CM as the point O.)
And now another convention rolls in. Convention convention~~~
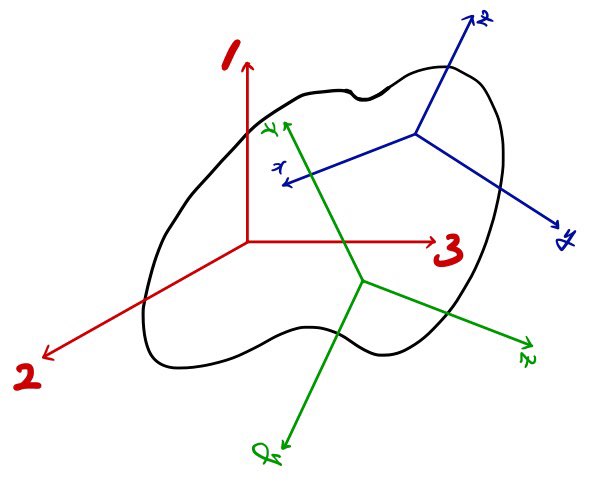
If the axis drawn in red up there is the principal axis, then!!
We write it differently from the others. Instead of x, y, z, we call the axes 1, 2, 3.
Like this:
“Hey GD park manager, does x-axis have to be axis 1, and y-axis axis 2, and—”
“—z-axis axis 3??????”
Nah~ as long as they’re 1, 2, 3 in some order, you’re fine. But there’s a common-sense convention for axes that I can at least pass along as common sense.
Cross product of the x and y unit vectors → direction should come out as z.
Cross product of y and z → should come out as x.
Cross product of z and x → should come out as y.
This is just… something I picked up somewhere too.
If this rule breaks, apparently the mathematical machinery stops working!
Because stuff becomes inconsistent??? I figure 1, 2, 3 should play by the same rule.
And now another convention, another convention, another convention, another convention, another convention, another convention.
The principal axis is so important it gets all sorts of special treatment.
Here’s the notation convention to flag that it’s the Principal Axis!!!!
$$\begin{matrix}{I_{xx}}\\{I_{yy}}\\{I_{zz}}\end{matrix}\quad \to \quad \begin{matrix}{I_{1}}\\{I_{2}}\\{I_{3}}\end{matrix}\qquad \begin{matrix}{w_{x}}\\{w_{y}}\\{w_{z}}\end{matrix}\quad \to \quad \begin{matrix}{w_{1}}\\{w_{2}}\\{w_{3}}\end{matrix}\qquad \begin{matrix}{\hat {i}}\\{\hat {j}}\\{\hat {k}}\end{matrix}\quad \to \quad \begin{matrix}{\hat {e}_{1}}\\{\hat {e}_{2}}\\{\hat {e}_{3}}\end{matrix}$$Got it?!?!!
We mark them differently like this~~~~ because the Principal Axis is precious heh.
And when we’re on the principal axis, the moment of inertia too….. (sob sob sob sob) (ah, forget it!!)
The name is “principal moment of inertia.”
And remember — when we first brought up the principal axis, we said the principal axis is the one where all~ the products of inertia become 0, right???
Yes yes yes yes. So the components of the principal moment of inertia tensor have all the off-diagonal product-of-inertia terms equal to 0.
$$\left\{I \right\} =\left( \begin{matrix}{I_{xx}}&{0}&{0}\\{0}&{I_{yy}}&{0}\\{0}&{0}&{I_{yy}}\end{matrix} \right) \quad =\quad \left( \begin{matrix}{I_{1}}&{0}&{0}\\{0}&{I_{2}}&{0}\\{0}&{0}&{I_{3}}\end{matrix} \right)$$Why do we learn about the principal axis~~ and why do we actually use it??
Because in a coordinate system whose axes coincide with the principal axes, for any rotation axis,
the moment of inertia, the angular momentum, and the rotational kinetic energy all become absurdly simple!!
1. Moment of inertia (scalar) — for this, you just sandwich the tensor between the direction-cosine vectors of the rotation axis, right???
$$I\quad =\quad \tilde {\hat {n}}\left\{I \right\} \hat {n}\quad =\quad (\cos\alpha ,\cos\beta ,\cos\gamma )\left( \begin{matrix}{I_{1}}&{0}&{0}\\{0}&{I_{2}}&{0}\\{0}&{0}&{I_{3}}\end{matrix} \right) \left( \begin{matrix}{\cos\alpha}\\{\cos\beta}\\{\cos\gamma}\end{matrix} \right) \\ =\quad I_{1}\cos^{2}\alpha \quad +\quad I_{2}\cos^{2}\beta \quad +\quad I_{3}\cos^{2}\gamma$$2. Angular momentum (vector) — for this, you just hit the tensor with the angular velocity vector $\omega$, right????
$$\overrightharpoonup {L}\quad =\quad \left\{I \right\} \overrightharpoonup {w}\quad =\quad \left( \begin{matrix}{I_{1}}&{0}&{0}\\{0}&{I_{2}}&{0}\\{0}&{0}&{I_{3}}\end{matrix} \right) \left( \begin{matrix}{w_{1}}\\{w_{2}}\\{w_{3}}\end{matrix} \right) \quad =\quad I_{1}w_{1}\hat {e}_{1}+I_{2}w_{2}\hat {e}_{2}+I_{3}w_{3}\hat {e}_{3}$$3. Kinetic energy (scalar) too —
$$T\quad =\frac {1}{2}\quad \tilde {\overrightharpoonup {w}}\left\{I \right\} \overrightharpoonup {w}\quad =\frac {1}{2}\quad (w_{1}\ w_{2}\ w_{3})\left( \begin{matrix}{I_{1}}&{0}&{0}\\{0}&{I_{2}}&{0}\\{0}&{0}&{I_{3}}\end{matrix} \right) \left( \begin{matrix}{w_{1}}\\{w_{2}}\\{w_{3}}\end{matrix} \right) \\ =\quad \frac {1}{2}(I_{1}w_{1}^{2}+I_{2}w_{2}^{2}+I_{3}w_{3}^{2})$$Let’s push a little further heh.
There’s something we haven’t thought about yet.
Namely — “dynamical balance!!”
This is a 3-dimensional thing.
In 3D, are the direction of $\vec{L}$ and the direction of $\vec{\omega}$ always the same???????
Nope, nope!
$$\overrightharpoonup {L}\quad =\quad \left\{I \right\} \overrightharpoonup {w}\quad =\quad \left( \begin{matrix}{I_{1}}&{0}&{0}\\{0}&{I_{2}}&{0}\\{0}&{0}&{I_{3}}\end{matrix} \right) \left( \begin{matrix}{w_{1}}\\{w_{2}}\\{w_{3}}\end{matrix} \right) \quad =\quad I_{1}w_{1}\hat {e}_{1}+I_{2}w_{2}\hat {e}_{2}+I_{3}w_{3}\hat {e}_{3}$$The direction of $\vec{L}$ can absolutely be different!!
BUT! There are cases where they are the same.
Specifically!!!! “If one of the three principal axes is the rotation axis, then the direction of $\vec{L}$ and the direction of $\vec{\omega}$ are the same.”
If one of axes 1, 2, 3 is your rotation axis, then $\vec{L} \parallel \vec{\omega}$ heh heh heh — got it?
Shall we grind through it with equations?
Say it rotates about axis 1. Then $\vec{\omega} = (w_1, 0, 0)$, right?!!?
$$\overrightharpoonup {L}\quad =\quad \left\{I \right\} \overrightharpoonup {w}\quad =\quad \left( \begin{matrix}{I_{1}}&{0}&{0}\\{0}&{I_{2}}&{0}\\{0}&{0}&{I_{3}}\end{matrix} \right) \left( \begin{matrix}{w_{1}}\\{0}\\{0}\end{matrix} \right) \quad =\quad I_{1}w_{1}\hat {e}_{1}$$And since $\vec{L}$ has nothing but the $\hat{e}_1$ component lol, $\vec{L} \parallel \vec{\omega}$ checks out, right? heh heh heh.
At this point, we say the body is in dynamical balance!
When angular momentum and angular velocity point the same way, apparently it spins crazy smooth~~~~ly.
You’ve seen stuff where you spin something, a torque gets generated, and the thing wobbles and shakes all over the place —
that’s because it’s not in dynamical balance, apparently.
There seems to be some discrepancy?????? that shows up, because the time-change of the $\vec{L}$ vector is the torque.
Originally written in Korean on my Naver blog (2015-01). Translated to English for gdpark.blog.