Euler Angles
Breaking down Euler angles — theta, phi, and psi — and how three coordinate systems team up to fully describe a spinning top's orientation in space.
Euler, bro. Why did this man do so many things?? (crying)
Every single one is hard, and here we go again… (crying)
This time — Euler angles.
We’re gonna learn how to describe a rotating body using Euler angles!
Let’s call our rotating body a top, yeah?
OK so, there are a bunch of ways to look at a top, and the most widely used one is the method of Euler angles (Eulerian Angles).
(Oh — and a top is kind of the canonical rotating-body example, plus it’s symmetric, which makes the whole thing easier to stare at.)
So everyone, together, picture a spinning top.
Euler angles, apparently, are one way of connecting a fixed coordinate system to a rotating coordinate system.
And here’s the thing — the definition of the angles matters a lot.
They’re written Θ, Φ, ψ.
You really need to know what theta, phi, and psi each mean.
“The coordinate system labeled 1, 2, 3 is fixed to the rigid body along the principal axes we defined earlier, and rotates with it.
The Oxyz coordinate system has directions fixed in space.
The third coordinate system, Ox’y’z’, provides the relationship between the principal axes attached to the rigid body and the axes fixed in space.”
«So now we’ve got three coordinate systems on stage: the 1-2-3 system, the Oxyz system, and the Ox’y’z’ system.»
Don’t panic!!! The 1-2-3 system is glued right onto the top and spins with it.
Oxyz is just a coordinate system that’s pinned in space. Nothing fancy.
And the new kid on the block, Ox’y’z’ — this one has a specific convention, and you really want to get this. Please, bear with me.
“The z’ axis coincides with the 3-axis — i.e., the symmetry axis of the rigid body.”
“The x’ axis is defined as the line of intersection of the 12-plane and the xy-plane. This axis is called the line of nodes.”
“The angle between the x-axis and the x’-axis is called Φ.”
“The angle between the z-axis and the z’(3)-axis is called Θ.”
“The rotation of the rigid body about the 3-axis is expressed by the angle ψ between the 1-axis and the x’-axis.”
The three angles theta, phi, and psi completely determine the orientation of the rigid body in space. These are the Euler angles (Eulerian Angles).
Don’t have a meltdown yet!!! Once you see it drawn out, you’ll go “Ohhhh, so that’s what that meant!!!” and it’ll click immediately.
Just a little more, heave-ho, heave-ho.
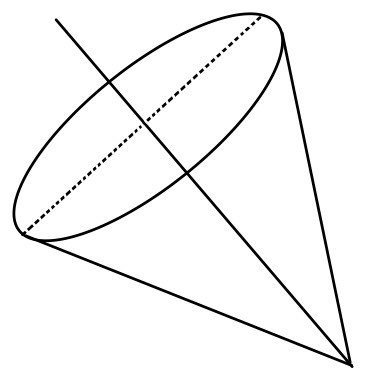
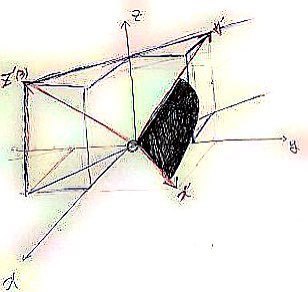
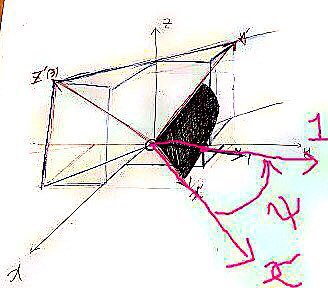
Say we’ve got a top shaped like this, currently spinning.
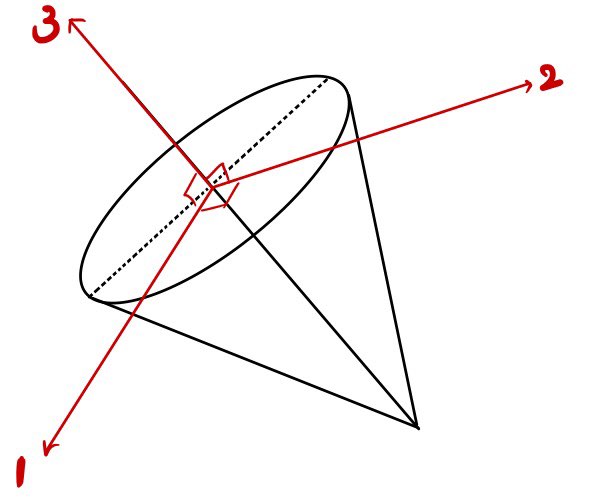
First, let’s draw in the O123 coordinate axes~
The top’s going round and round, and we just — snap — took a photo.
So the 1, 2, 3 axes look frozen, but actually they’re mid-spin~
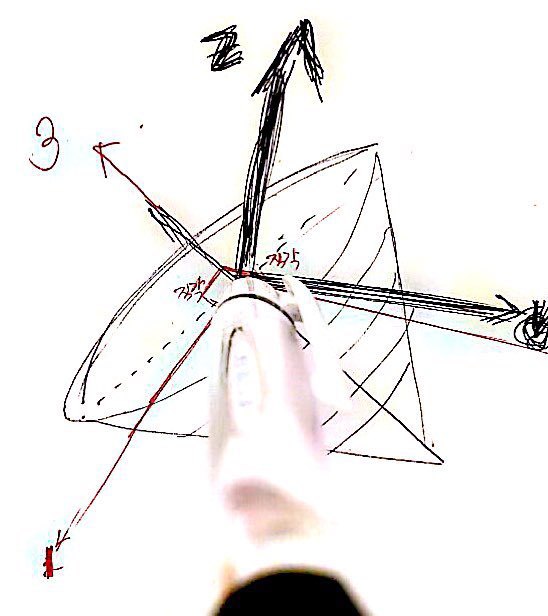
This time I also drew in the fixed coordinate system Oxyz, heh heh heh.
The x-axis comes straight out of the page toward us, so my pen had to make an appearance hahaha.
(Accidentally turned into a Jetstream pen product placement. My bad.)
OK OK OK, we said the Oxyz axes and the O123 axes share the same origin, right?
And since the 1, 2, 3 axes are principal axes (products of inertia = 0), the 3-axis is the same as the rotation axis direction.
So far so good, right.
Now —
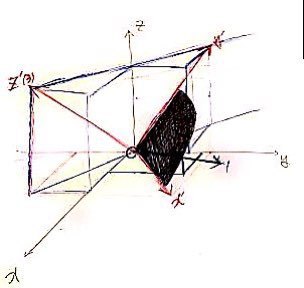
let’s go through the convention for the Ox’y’z’ axes properly, step by step.
First, the definitions:
“The z’ axis coincides with the 3-axis — the symmetry axis of the rigid body.”
“The x’ axis is defined as the line of intersection of the 12-plane and the xy-plane. This is the line of nodes.”
(You’re asking where the definition of y’ is? Well — $z' \times x' = y'$. Once you’ve got two axes, the third one comes for free~ heh.)
OK so z’ is easy — same as the 3-axis, done.
One left. We just need the line of intersection of the 12-plane and the xy-plane, and that’s the x’ axis!!!
Alright, let’s go hunt down that line of nodes.
Since it’s the intersection of the xy-plane and the 12-plane,
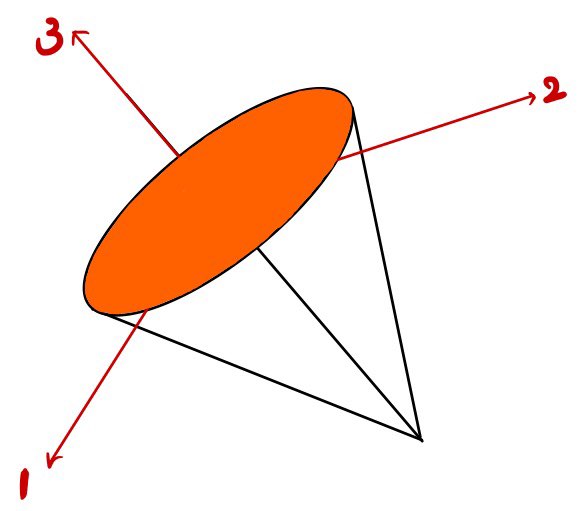
honestly, don’t try to picture the 12-plane abstractly — just think of the disk of the top. The deck.
That’s the part I colored in.
That colored part is a chunk of the 12-plane, right?
Now we’re gonna take a knife and slice straight through. (The edge of the cross-section after the cut — that’s the line of intersection!)
How do we cut?
I’ll do this in words.
The top’s spinning on the ground (tilted a teeny bit).
Parallel to the ground, swoosh with the knife, so it passes through the center of the top’s deck!!!
Make a clean!!!!! cut, and the edge that shows up on the deck — that is the x’ axis!!!!!!
Is the verbal description easier?????? hahaha.
Got the feel of it?
I’ll do y’ in words too. Sure, you could just do $z' \times x'$ and be done, but let’s go with words anyway.
Take the knife, bring it straight down — perpendicular to the ground — onto the spinning top, cut through the center of the deck — thwack — and the edge that appears is!!!!!! the y’-axis!!!!!!
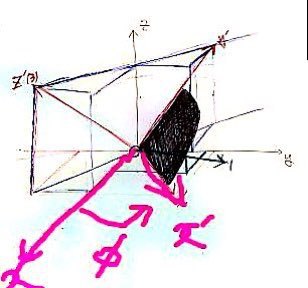
I’ve got a diagram I’ll use properly later, but let me sneak it in here real quick.
(@@@@ Warning: extremely well-drawn diagram @@@@)
Cut parallel to the ground — swoosh!!
Cut perpendicular to the ground — swoosh!!
— and look at the edges.
You get it now, right???????
Yes! Moving on.
Now the angles!!!!
theta, phi, psi — here we go.
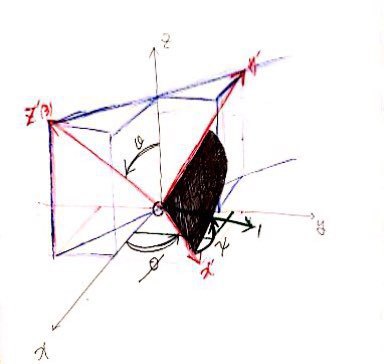
The O123 axes are missing from the diagram above, but since the 3-axis = the z’-axis, no need to redraw it!!
And the 1-axis is mid-spin going whoosh-whoosh~, so let’s take another snap~~ photo.
(I won’t draw the 2-axis. 3D diagrams get cluttered real fast.)
In the diagram above, I drew only the 1-axis!!!!!!!!!!!!!!!!!!
See the little parenthetical “3” next to the z’-axis? Yeah — so only the 2-axis is missing now. Please imagine it on your own.
It’s not hard.
OK then, first!!!!!!
“The angle between the x-axis and the x’-axis is called Φ.”
So — that’s phi!!!
Easy!! There it is!!
“The angle between the z-axis and the z’(3)-axis is called Θ.”
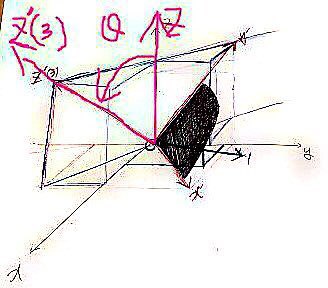
Theta is also easy!!!!!!!!!!
“The rotation of the rigid body about the 3-axis is expressed by the angle ψ between the 1-axis and the x’-axis.”
Psi is easy too! Psi is basically just the angle describing the spin??? heh heh heh.
Yes yes yes yes that’s right — spin spin spin!
Here’s the diagram with all the angles drawn in!!!
Now now now now — those angles right there are for the spinning top at the exact instant the photo was taken.
So 0.0000001 seconds later, all those angles will have changed completely. (Or maybe they won’t! Depends.)
OK so here’s what I’m saying, heh heh heh.
When the top’s spinning, is theta always constant, or always changing?
If the top is spinning nice and steady in place, theta could actually be constant for a while. Sure.
But what if it’s a dying top?? It’s gonna gradually topple over, so theta will be changing, right??
Same deal for phi. Could be changing, could be constant. Depends on the situation.
So don’t lock into thinking of these as “always changing” or “always constant” variables, OK??
However — psi is always changing, haha. Because the top is spinning, haha.
Basic stuff, yeah, but —
I was pretty confused by this at first, heh heh.
Gonna wrap here and get the second installment of the Euler angles post ready.
Originally written in Korean on my Naver blog (2015-01). Translated to English for gdpark.blog.