Lorentz Transformation and Lorentz Boosts
We finally wrap up the Lorentz transformation by using hyperbolic angles to assign ct', x' coordinates to events in a relatively moving frame!
Alright, now let’s really wrap up the Lorentz transformation and finish this off!!!!
As mentioned earlier, what we’re going to do is this,
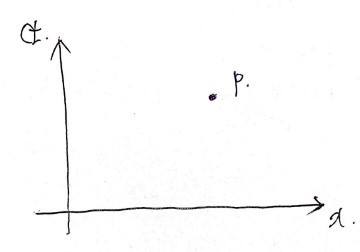
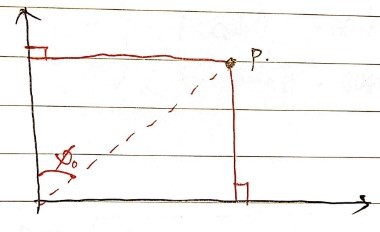
In x-ct spacetime, event P can be expressed as (ct, x)!?!??!
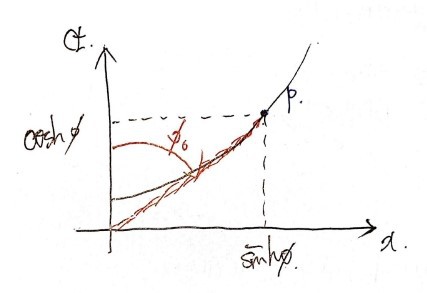
And using the hyperbolic angle,
we covered that it can be expressed with simple coordinates like this.
But wait, for a frame in relative motion like this, event P —
how are we supposed to assign ct’, x’ coordinates to it!!!!!
Can’t we somehow pull something off using the hyperbolic angle phi?!?!?!?!?!?!?!?!?!?!?!?!?!
That’s what we’re going to do now!!!!!!!
So now the problem can be arranged like this!!!!! Looking at the picture drawn out like this!!!!!

we can say this!!!!!
As we saw earlier, the hyperbolic angle is defined as the arc length when viewing the hyperbola from the closed hyperbola,
so it can be represented as that linear combination!!!!!
And as for the definition of hyperbolic functions,
if you look at a general math book, there’s a formula like this!!!
(Oh by the way, it’s been a while since I graduated high school,,,, hyperbolics aren’t taught in high school, right?!?!?!)
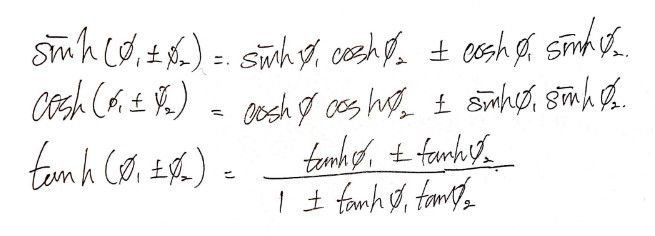
There’s a formula like this????
The derivation is simple… so I’ll just use that formula!!!
(If you switch to the exponential form, the derivation is really simple!)
If you think carefully about expressing the position of point P using hyperbolic functions,
we drop it straight down at 90 degrees like this
and can express it as coshΦ and sinhΦ.
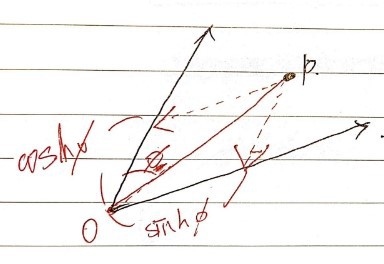
So in this kind of spacetime, it can be represented like this
The red dotted line and the black solid line are at 90 degrees!!!!!
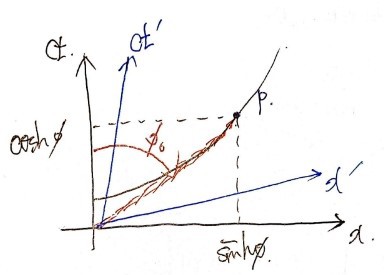
Now we’re all set to calculate the Lorentz transformation.
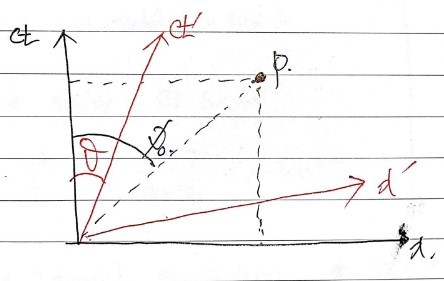
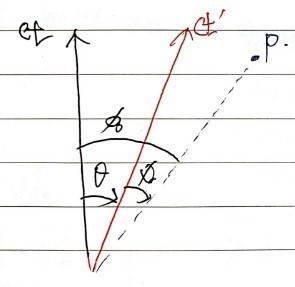
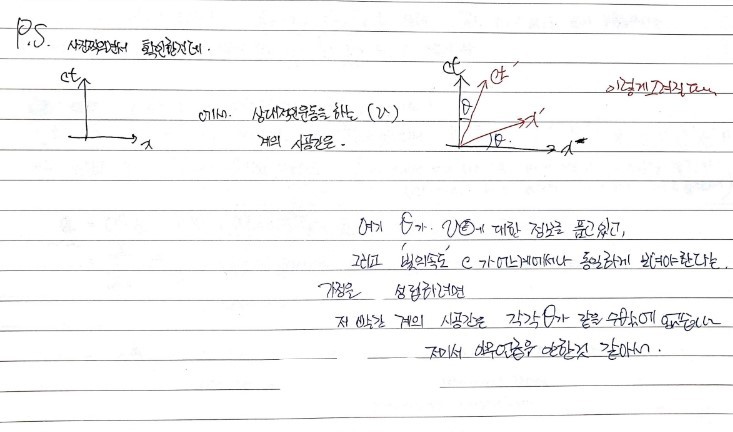
Let’s represent the spacetime of O’, moving with relative velocity v with respect to O, as follows
Hmm~~~ the info about v should be contained in θ, riiight?!?
Now let’s first express event P in the black frame
and then express it in the red coordinate system.
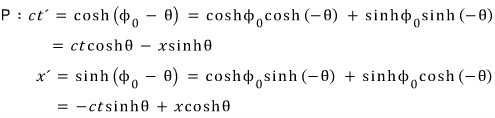
Using the fact that cosh is an even function and sinh is an odd function, you can derive it even more easily!
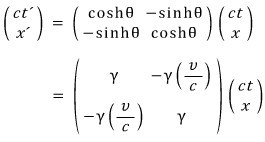
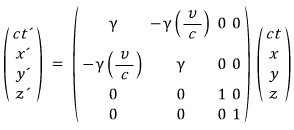
Now if we express those two equations as a matrix, we get the transformation!!!!

And

if we plug x’ = 0 into this equation,
the meaning of the equation is x’=0, i.e., an equation for the relative velocity v comes out,
let’s do it!!!
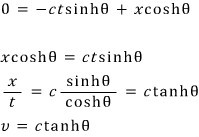
We can make it like this,
oh but

if we mix this together with this equation.

We express hyperbolic cosine as gamma like this,
and hyperbolic sine is

then now the matrix
doesn’t need an angle anymore!!!!!!!!!!
If we include the y, z axes too!!!?!?!??!?!?!
(However, these are y, z axes with no involvement. Meaning it’s not general. Because even though there are y, z axes, we’re only looking at the x-axis direction)
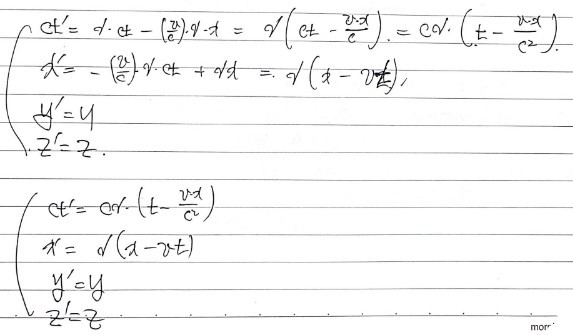
If you don’t like this?!?!?!?!?
Then if we just list it out as equations
typing it in an equation editor is way too annoying,
please… understand…
This kind of transformation is called the Lorentz transformation~~~~~~~~~~~~~~~~~~~~~~~~~
— total BS.
What we just did was a somewhat special case.
Because we fixed the direction in y, z and only looked at the relative velocity in the x direction.
So this kind of special case isn’t called the Lorentz transformation,
it’s called the Lorentz Boots, they saaay~
The Lorentz transformation is a transformation for a more general case,
but at the introductory level, this kind of discussion that only considers the x direction is also commonly called the Lorentz transformation, apparently…
Since that one subsumes this anyway?????
(Still, let’s at least know that such a term exists~ and let’s moooove on! hehehehe hehe)
Originally written in Korean on my Naver blog (2017-05). Translated to English for gdpark.blog.